Ubuntu20.4配置arm交叉编译环境
我是在虚拟机中配置的,如果你的嵌入式设备足够完成自己的编译,可以不考虑虚拟机的。
- 新安装的Ubuntu20.04系统请先执行以下代码
sudo apt update
sudo apt upgrade
- 到aarch64下载对应的aarch64的base镜像。

- 之后执行如下命令,创建armsys文件夹,之后将刚下载的镜像拷贝到该文件夹下并且解压
cd /
mkdir /armsys
- 安装一些必要的软件
sudo apt install qemu qemu-user-static binfmt-support debootstrap
- 注册aarch64的运行环境
sudo update-binfmts --enable qemu-aarch64
- 为了能在x86 Ubuntu上chroot到/armsys并执行aarch64的程序,还需要将qemu-aarch64-static拷贝到/path/to/rootfs/usr/bin/;
sudo cp -av /usr/bin/qemu-aarch64-static /armsys/usr/bin/
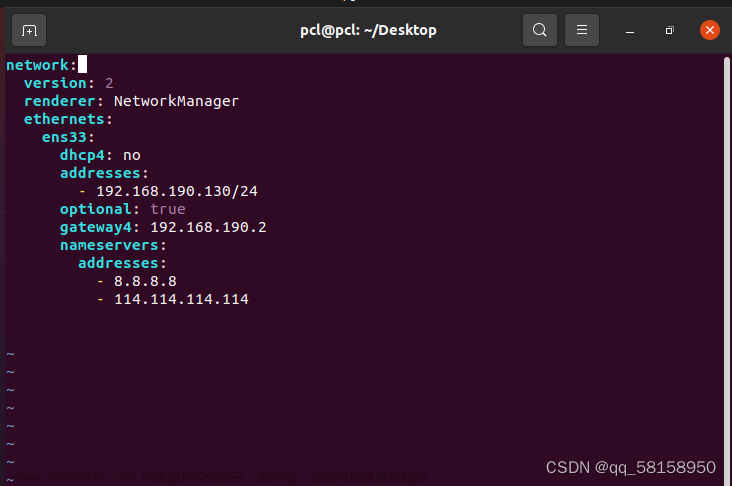
- 配置arrch64 Ubuntu的网关;
cp /etc/resolv.conf /armsys/etc/resolv.conf
- chroot到aarch64 Ubuntu的armsys,并安装开发库。
sudo chroot /armsys
apt update
apt upgrade
apt install -y libopencv-dev
执行后面的update可能会报错
这个时候我们需要去检查/dev/null
rm -f /dev/null
mknod -m 666 /dev/null c 1 3
以上命令也可能无法创建null ,这个时候我们只要去到对应的文件夹修改null权限为666就可以正常运行上述代码了。
- 准备x86上aarch64的编译工具。
exit
sudo apt-get install gcc-aarch64-linux-gnu g++-aarch64-linux-gnu
- 在arm环境中安装交叉编译工具,并且将/usr/bin添加到环境变量
apt-get install gcc-aarch64-linux-gnu
pt-get install g++-aarch64-linux-gnu
apt install vim
vim /etc/profile
# 将下面的一句话放到文件末尾
# export PATH="/usr/bin:$PATH"
source /etc/profile
# 查看gcc版本
aarch64-linux-gnu-gcc -v
编译Qt5.12.8
- 在Qt5.12.8下载对应的源码包

- 将下载完成的QT源码拷贝到对应的文件夹内,解压源码
tar -xvf qt-everywhere-src-5.12.8.tar.xz
- 解压完毕之后进入源码目录,修改文件
vim qtbase/mkspecs/linux-aarch64-gnu-g++/qmake.conf
# 增加一下内容
QT_QPA_DEFAULT_PLATFORM = linuxfb
QMAKE_CFLAGS_RELEASE += -O2 -march=armv7-a -lts
QMAKE_CXXFLAGS_RELEASE += -O2 -march=armv7-a -lts
- 安装ninja
apt-get install ninja-build
- 安装xcb

下载拷贝到linux的arm环境内
之后运行如下脚本:
./configure
make -j4
make install
# 必须先执行proto之后再安装libxcb。如果你在libxcb ./configure的时候报错了执行下面的脚本
sudo apt install libxau-dev libpthread-stubs0-dev
当然,如果你的make命令不能执行,你需要安装一下。
- 上述执行完成之后开始编译QT
./configure -prefix /usr/bin/arm512qt5.12.8 -xplatform linux-aarch64-gnu-g++
报错,故而安装了一些额外的包
apt-get install flex
apt-get install bison
apt-get install gperf
apt-get install libxcb*
apt-get install build-essential
apt-get install libgl1-mesa-dev
apt-get install libglu1-mesa-dev
apt-get install libegl1-mesa-dev
apt-get install freeglut3-dev
如果你在编译的时候报错(numeric_limits),进入源码/qtbase/src/corelib/global 修改qglobal.h
#ifdef __cplusplus
#include <type_traits>
#include <cstddef>
#include <utility>
#include <limits> //加上这行
#endif
#ifndef ASSEMBLER
#include <assert.h>
#include <stddef.h>
#endif
如果你遇到问题 ERROR: Cannot compile a minimal program. The toolchain or QMakeSpec is broken.文章来源:https://www.toymoban.com/news/detail-458794.html
./configure -prefix /usr/bin/arm512qt5.12.8
中途会报两个错误,源自于QT源码错误,只要将对应的头文件和cpp文件缺失的头包含进去就行了。(报错很明显,不需要再贴图了哈。)文章来源地址https://www.toymoban.com/news/detail-458794.html
到了这里,关于Ubuntu20.4配置arm交叉编译环境的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!