OpenCV实现目标检测
目标检测是计算机视觉领域的一大重要分支,在自动驾驶等领域发挥着重大作用。本文将介绍如何通过OpenCV实现简单的目标检测。
环境准备
创建并进入虚拟环境
conda create -n opencv python=3.9
conda activate opencv
安装依赖
pip install opencv-python
下载其他文件
链接:https://pan.baidu.com/s/1nW_WE6PqIEmY78gnjmhE7Q
提取码:4d5o
网盘中包含coco.names、权重文件和配置文件。
coco.nams包含了一些常见的目标,如
person
bicycle
car
motorcycle
airplane
bus
train
truck
boat
traffic light
图像目标检测
cv2.dnn_DetectionModel()
定义目标检测模型,并可设置权重文件和配置文件
cv2.dnn_DetectionModel(weightsPath,configPath)
net.detect()
进行目标检测
classIds, confs, bbox = net.detect(img, confThreshold=0.5)
cv2.rectangle()
绘制矩形
cv2.rectangle(img, box, color=(0, 255, 0), thickness=2)
cv2.putText()
添加文字
cv2.putText(image, text, (5,50 ), cv2.FONT_HERSHEY_SIMPLEX, 0.75, (0, 0, 255), 2)
参数说明:
- 图片
- 要添加的文字
- 文字添加的位置
- 字体
- 字体大小
- 字体颜色
- 字体粗细
import cv2
classNames = []
classFile = 'coco.names'
with open(classFile,'rt') as f:
classNames = f.read().rstrip('\n').split('\n')
# print(classNames)
configPath = 'ssd_mobilenet_v3_large_coco_2020_01_14.pbtxt'
weightsPath = 'frozen_inference_graph.pb'
net = cv2.dnn_DetectionModel(weightsPath,configPath)
net.setInputSize(320,320)
net.setInputScale(1.0/ 127.5)
net.setInputMean((127.5, 127.5, 127.5))
net.setInputSwapRB(True)
img = cv2.imread('1.jpg')
classIds, confs, bbox = net.detect(img, confThreshold=0.5)
# print(classIds, bbox)
for classId, confidence, box in zip(classIds.flatten(), confs.flatten(), bbox):
cv2.rectangle(img, box, color=(0, 255, 0), thickness=2)
cv2.putText(img, classNames[classId - 1].upper(), (box[0] + 10, box[1] + 30),
cv2.FONT_HERSHEY_COMPLEX, 1, (0, 255, 0), 2)
cv2.imshow('res', img)
cv2.waitKey(0)

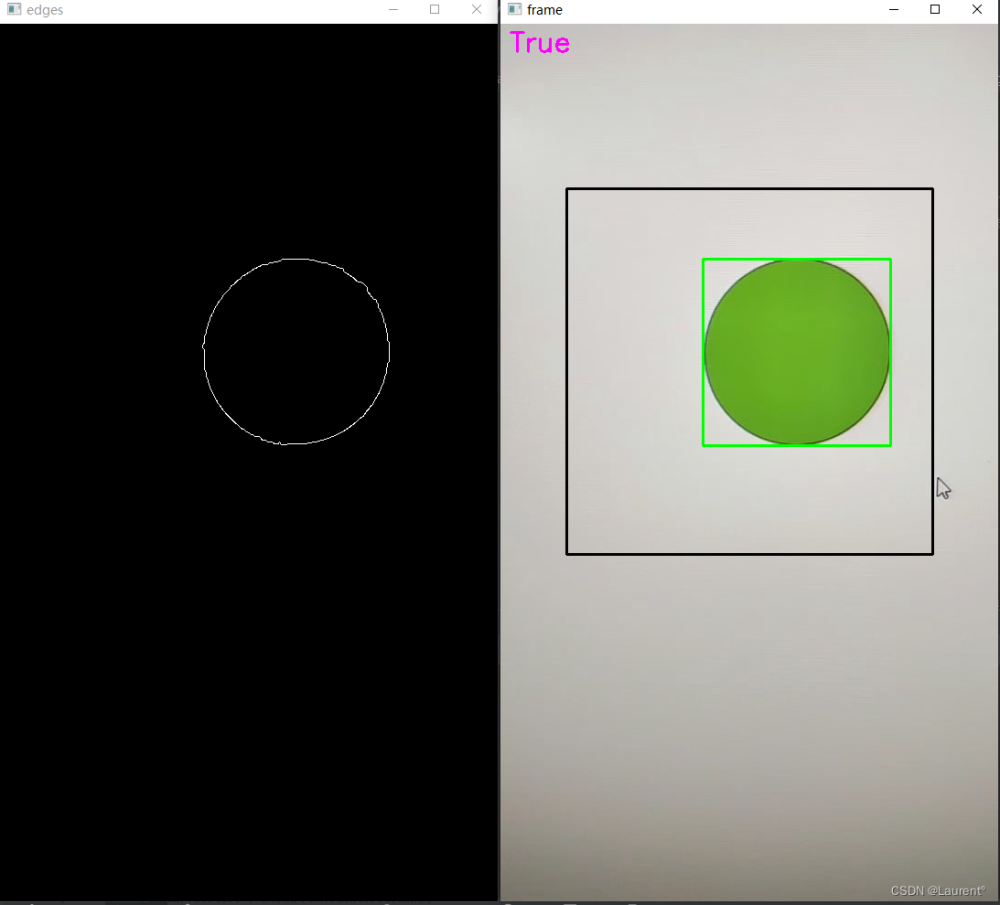
摄像头实时目标检测
除了对图像进行目标检测,OpenCV也可以开启摄像头进行实时目标检测。文章来源:https://www.toymoban.com/news/detail-458838.html
cv2.VideoCapture()
开启摄像头
cv2.VideoCapture(0):开启笔记本自带摄像头
cv2.VideoCapture(1):开启USB摄像头文章来源地址https://www.toymoban.com/news/detail-458838.html
import cv2
thres = 0.45 # Threshold to detect object
cap = cv2.VideoCapture(1)
cap.set(3,1280)
cap.set(4,720)
cap.set(10,70)
classNames= []
classFile = 'coco.names'
with open(classFile,'rt') as f:
classNames = f.read().rstrip('\n').split('\n')
configPath = 'ssd_mobilenet_v3_large_coco_2020_01_14.pbtxt'
weightsPath = 'frozen_inference_graph.pb'
net = cv2.dnn_DetectionModel(weightsPath,configPath)
net.setInputSize(320,320)
net.setInputScale(1.0/ 127.5)
net.setInputMean((127.5, 127.5, 127.5))
net.setInputSwapRB(True)
while True:
success,img = cap.read()
classIds, confs, bbox = net.detect(img,confThreshold=thres)
print(classIds,bbox)
if len(classIds) != 0:
for classId, confidence,box in zip(classIds.flatten(),confs.flatten(),bbox):
cv2.rectangle(img,box,color=(0,255,0),thickness=2)
cv2.putText(img,classNames[classId-1].upper(),(box[0]+10,box[1]+30),
cv2.FONT_HERSHEY_COMPLEX,1,(0,255,0),2)
cv2.putText(img,str(round(confidence*100,2)),(box[0]+200,box[1]+30),
cv2.FONT_HERSHEY_COMPLEX,1,(0,255,0),2)
cv2.imshow("Output",img)
cv2.waitKey(1)
到了这里,关于OpenCV实现目标检测的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!