一、凸包检测

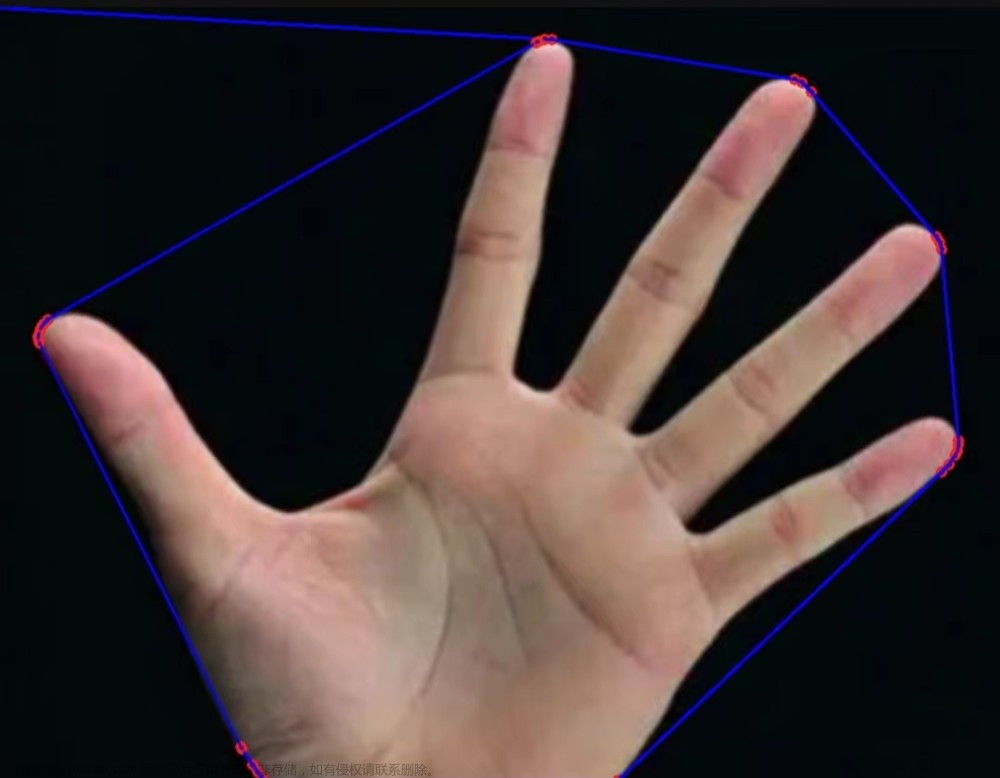
图中左侧为边缘检测的效果,中间为图像经过二值化的效果,右图为凸包检测效果。
convexHull(lnputArraypoints, OutputArray hull,bool clockwise = false, bool returnPoints = true)
points:输入的2D点集。
hull:输出凸包的顶点。
clockwise:方向标志,当参数为true时,凸包顺序为顺时针方向,否则为逆时针方向。
returnPoints:输出数据的类型标志,当参数为true时第二个参数输出的结果是凸包顶点的坐标,否则第二个参数输出的结果是凸包顶点的索引。
这里的计算实例如下:
int main() {
//读取图片
Mat src = imread("图片1.png");
if (src.empty())
{
printf("不能打开空图片");
return -1;
}
Mat gray, binary;
//转化为灰度图
cvtColor(src, gray, COLOR_BGR2GRAY);
//二值化
threshold(gray, binary, 105, 255, THRESH_BINARY);
//开运算去除细小区域
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(binary, binary, MORPH_RECT, k);
//轮廓检测
vector<vector<Point>>contours;
//存放轮廓结构变量
vector<Vec4i>hierarchy;
findContours(binary, contours, hierarchy, 0, 2, Point());
for (int i = 0; i < contours.size(); i++)
{
//计算凸包
vector<Point>hull;
convexHull(contours[i], hull);
//绘制凸包
for (int j = 0; j < hull.size(); j++)
{
//绘制凸包顶点
circle(src, hull[j], 4, Scalar(255, 0, 0), 2, 8, 0);
//连接凸包
//将起始点与终点相连
if (j == hull.size()-1)
{
line(src, hull[j], hull[0], Scalar(0, 0, 255), 2, 8, 0);
break;
}
line(src, hull[j], hull[j+1], Scalar(0, 0, 255), 2, 8, 0);
}
}
imshow("q", src);
waitKey(0);
return 0;
}
二、直线检测
检测直线的霍夫变换原理:
先看左上角的图像,图中我们可以看出三条直线都经过了一个点。这里我们可以将y=kx+b一个函数描述这三条直线。由于都经过一个点,所以(x,y)的参数是固定的,右上角的图像为k、b的参数空间。也就是说参数空间中的每一个点都可以描述原空间的每一条直线。
上图中左上方图片可以看出,这三个点绘制成的直线没有斜率k,因此不能在参数空间上表示该直线。这时我们可以采用上图中的下部分的方法:可以用直线到坐标原点的距离,以及垂线与x轴的夹角来表示这一直线。
检测直线过程:
标准霍夫变换函数:
HoughLines(IlnputArray image, OutputArray lines,double rho, double theta, int threshold, double srn = 0, double stn = 0, double min_theta = 0, double max_theta = cv_PI)
image:目标图像。
lines: 检测直线的输出量。
rho:离散化后的单位长度。
theta:离散化后的单位角度。
threshold:步骤三中的阈值。
srn、stn:当两参数为0时,则为标准的霍夫变换,不为零则为多尺度霍夫变换。
min_theta、max_theta:角度最大最小值。
渐进概率式霍夫变换:
HoughllLinesP(InputArrayimage, OutputArray lines, double rho, double theta, int threshold, minLineLength =, void cv=HoughllLinesP( InputArrayimage, OutputArray lines.double 0, double maxLineGap = 0)
image:待检测直线的原图像,必须是CV_8C的单通道二值图像。
lines:霍夫变换检测到的直线输出量,每一条直线都由4个参数进行描述,分别是直线两个端点的坐标rho:以像素为单位的距离分辨率。
theta:以弧度为单位的角度分辨率。
threshold:累加器的阈值。
minLineLength:直线的最小长度,当检测直线的长度小于该数值时将会被剔除。
maxLineGap:允许将同一行两个点连接起来的最大距离。
标准霍夫变换应用案例:文章来源:https://www.toymoban.com/news/detail-459719.html
void drawLine(Mat &img, //原图像
vector<Vec2f> lines, //检测的直线数据
double rows, //原图的行数
double cols,//原图的列数
Scalar scalar, //绘制直线的颜色
int n //绘制直线的线宽
)
{
Point pt1, pt2;
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0]; //直线距离坐标原点的距离
float theta = lines[i][1]; //直线过坐标原点垂线与x轴的夹角
double a = cos(theta); //夹角的余弦值
double b = sin(theta);//夹角的正弦值
double x0 = a * rho, y0 = b * rho;//直角与过坐标原点的垂线交点
double length = max(rows, cols); // 图像高度的最大值、计算直线上的一点
pt1.x = cvRound(x0 + length * (-b));
pt1.y = cvRound(y0 + length * (a));
//计算直线上另一点
pt2.x = cvRound(x0 - length * (-b));
pt2.y = cvRound(y0 - length * (a));
//两点绘制一条直线
line(img, pt1, pt2, scalar, n);
}
}
int main() {
//以灰度图形式读取图片
Mat src = imread("2.jpg", IMREAD_GRAYSCALE);
if (src.empty())
{
printf("不能打开空图片");
return -1;
}
//检测边缘图像,并二值化
Mat edge;
Canny(src, edge, 80, 180, 3, false);
//进行二值化操作
threshold(edge, edge, 170, 255, THRESH_BINARY);
//使用累加器检测直线
vector<Vec2f> line1, line2;
HoughLines(edge, line1, 1, CV_PI / 180, 50, 0, 0);
HoughLines(edge, line2, 1, CV_PI / 180, 150, 0, 0);
//在原图中绘制直线
Mat img1, img2;
//深拷贝出两个原图像,对比两个变换的结果
src.copyTo(img1);
src.copyTo(img2);
//绘制图像
drawLine(img1, line1, edge.rows, edge.cols, Scalar(255), 2);
drawLine(img2, line2, edge.rows, edge.cols, Scalar(255), 2);
imshow("a", img1);
imshow("b", img2);
imshow("c", edge);
waitKey(0);
return 0;
}
运行上述的代码可以显示出如下三个图片:
边缘检测效果:
阈值较大的显示效果:
阈值较小的显示效果:
渐进概率霍夫变换应用案例:文章来源地址https://www.toymoban.com/news/detail-459719.html
int main() {
//以灰度图形式读取图片
Mat src = imread("2.jpg", IMREAD_GRAYSCALE);
if (src.empty())
{
printf("不能打开空图片");
return -1;
}
//检测边缘图像,并二值化
Mat edge;
Canny(src, edge, 80, 180, 3, false);
//使用渐进式霍夫变换提取直线
vector<Vec4i> linesP1, linesP2;
//两个点连接最大距离10
HoughLinesP(edge, linesP1, 1, CV_PI / 180, 150, 30, 10);
//两个点连接最大距离30
HoughLinesP(edge, linesP2, 1, CV_PI / 180, 150, 30, 30);
//分别绘制两个不同阈值的直线
Mat img1;
src.copyTo(img1);
for (size_t i = 0; i < linesP1.size(); i++)
{
line(img1, Point(linesP1[i][0], linesP1[i][1]), Point(linesP1[i][2], linesP1[i][3]), Scalar(255), 3);
}
imshow("q", img1);
Mat img2;
src.copyTo(img2);
for (size_t i = 0; i < linesP2.size(); i++)
{
line(img2, Point(linesP2[i][0], linesP2[i][1]), Point(linesP2[i][2], linesP2[i][3]), Scalar(255), 3);
}
imshow("q", img1);
imshow("w", img2);
waitKey(0);
return 0;
}
到了这里,关于opencv_c++学习(二十二)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!