今日继续学习提升蓝桥杯国赛能力水平。
有道是:卜心事、灯花无语,百感孤单,鸳被羞展......
梦方圆,又丛钟、声声惊断。
诗人杨玉衔孤单影只,偏偏又多遭磨难,一路坎坷......
正如我近日来学习提升串口通信技能一样,遇到诸多设计上的险阻。
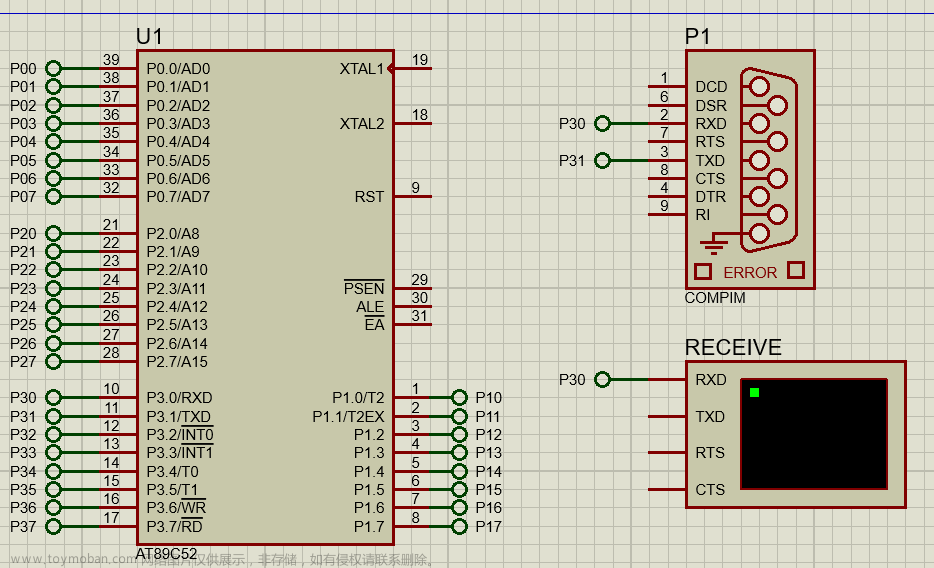
本篇主要解决以下串口通信方面的问题:
1.上位主机发送命令字符串,单片机接收校对后执行指令
2.单片机某个变量在改变,要求与字符串拼接后发送给主机
注意:本文不是零基础开始的,需要对串口有基础认识,会用串口收发单八位字节
目录
如零基础学习串口,请传送到这篇文章:
本文提供问题解决的工程文件:
关于单片机接收字符串指令问题的解决:
关于拼接变量与字符串发送的问题:
如零基础学习串口,请传送到这篇文章:
蓝桥杯单片机串口通信学习提升笔记_NULL指向我的博客-CSDN博客
本文提供问题解决的工程文件:
问题一过程文件:
https://download.csdn.net/download/qq_64257614/87808393?spm=1001.2014.3001.5503
问题二过程文件:
https://download.csdn.net/download/qq_64257614/87809191?spm=1001.2014.3001.5503
关于单片机接收字符串指令问题的解决:
你是否也困扰于某些省赛国赛题目(第十届)中,有上位机发送字符串命令
单片机接受并处理的要求,比如:
“单片机接收到上位机指令“START\r\n”,上报XXX数据”
“如设备接收到错误指令,返回“ERROR\r\n” ”
其实他们本意就是考察我们对串口收发的熟悉程度。
下表是printf函数的

我们可以从以下实验来学习强化这方面的知识:
/*
本实验练习串口通信:主要练习以下内容:
数组接收判断上位机的命令
收到 START\r\n 就 打印 OVER\r\n
其余都打印 ERROR\r\n
*/我们首先在变量定义来讲解:
bit URX_Over = 0;
unsigned char idata URX[10] = 0;
unsigned char idata URX_Num = 0;
unsigned char idata URX_tt = 0;1.URX_Over是标志位,当其值为1时,会进入函数处理比较字符串,PS:它将在定时器中出现,
2.URX[10] 是字符串数组,他用于接受上位机发来的字符串命令,接收处理完后要全部清零,
因为有些命令比较长,而有些比较短,在接受了一个长的字符串后,不清空数组
的话,短命令就无法正常比较了.
比如第一次接收到了长命令START\r\n,第二次发来短命令ST\r\n,但因为没清空数组 所以第二次数组内的情况是ST\r\nT\r\n,这就会被判断为是一个错误指令。
memset(URX,0,sizeof(URX));//处理完命令别忘了将其清零,以便接收下个命令3.URX_Num 用来辅助字符串数组URX[10] 接收SBUF寄存器的内容
4.URX_tt 用来标记接收是否完成,它同时在定时器中会进行自加,
每次RI不为0,接收数据时,它都会被清零, 直到接收完毕,
接收完毕后它就不会再被清零了
此时的它在定时器中不断自加,到一定值后 就会 刷新标志位URX_Over,
从而推动 字符串比较进程的开展。
涉及以上过程的代码如下贴出:
此段代码对应串口中断的过程:
bit URX_Over = 0;
unsigned char idata URX[10] = 0;
unsigned char idata URX_Num = 0;
unsigned char idata URX_tt = 0;
//串口1中断服务函数
void Uart_1_serv() interrupt 4
{
if(RI)
{
RI=0; URX_tt = 0;
if(URX_Num < 10) { URX[URX_Num++] = SBUF; }
}
}此段代码是定时器中的过程:
void Timer0Init(void) //1毫秒@12.000MHz
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0x01; //设置定时器模式
TL0 = 0x20; //设置定时初始值
TH0 = 0xD1; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
EA=1;
ET0=1;
}
void Timer0(void) interrupt 1
{
TL0 = 0x20; //设置定时初始值
TH0 = 0xD1; //设置定时初始值
if(URX_Num > 0){if(++URX_tt == 30) { URX_Over = 1;} }
}最后是主程序While()循环中,对字符串命令的判断:
#include "stdio.h"
#include "string.h"
u8 str1[ ]="START\r\n";
if(URX_Over == 1)
{
URX_Over =0;
if(strncmp(URX,str1,7)==0) Uart_Sendstring("OVER\r\n");
else Uart_Sendstring("ERROR\r\n");
URX_Num = 0;
}此处需要注意:URX_Num = 0; 这句
表示处理完了字符串命令,就清零,以便URX[10] 接收下个命令字符串
下载后进行调试,效果如下:

证明我们的串口字符串命令收发非常顺利!!!
如果字符串命令种类不止一条:
我们在处理接收的if(URX_Over == 1)语句中就需要加上一些if语句:
下段代码就是接收START\r\n 与 HI\r\n并做相应回复的例子


关于拼接变量与字符串发送的问题:
这个问题我习惯用的有俩种解决方式:
1.用重定向的printf()函数
2.使用senddata()函数,但需要另外定义数组和写函数进行拼接字符串与变量值
但此处建议与介绍 使用printf(),虽然占用多些资源,但不影响竞赛要求!
我们都知道printf 函数的一般调用格式为:printf("<格式化字符串>", <参量表>)
以下为在chitgpt搜索到的关于%bu格式转换字符的原理与应用:
在Keil编程中,使用printf函数的%bu格式转换字符是用于
将一个unsigned char类型的整数以十进制的形式输出。
%bu是printf函数的格式控制字符串中的占位符,
用于指示需要输出一个unsigned char类型的整数。
在基础知识方面,
unsigned char类型是一种无符号字符类型,它可以存储0到255之间的整数。它通常用于表示二进制数据的字节和字符。
在C语言中,
可以使用%u格式控制字符串输出unsigned char类型的整数,但是由于printf函数默认将char类型看作有符号类型,因此使用%u格式控制字符串输出unsigned char类型的整数时可能会出现问题。因此,为了避免这种问题,可以使用%bu格式控制字符串来输出unsigned char类型的整数。
下面是一个使用%bu格式控制字符串输出unsigned char类型的整数的例子:
unsigned char value = 255;
printf("The value is %bu\n", value);输出结果为:
The value is 255于是,我们便知道了该如何拼接变量与字符了
以下为实践内容要求:
定义test1与 test2,每300ms自加,每次自加后发送:
the new test1 is (test1的值)\r\n the new test2 is (test2的值)\r\n 我们只需对照着要求,在定时器中使他们自加,然后附上printf函数格式化输出即可:
定时器中并没有直接放printf函数,因为主函数也调用该函数,为防止报错重入警告,我们将printf的操作放在主函数,定时器刷新标志给主函数决定是不是该进行printf的操作了:
bit test_flag=0;
void Timer0(void) interrupt 1
{
u16 i;
TL0 = 0x20; //设置定时初始值
TH0 = 0xD1; //设置定时初始值
i++;
if(URX_Num > 0){if(++URX_tt == 30) { URX_Over = 1;} }
if(i==300)
{
i=0;
test1++;test2++;
if(test1==10) test1=0;
if(test2==10) test2=0;
test_flag=1; //打印标志位——传给主函数
}
}以下为主函数:
void main()
{
u8 test=2;
cls_buzz_led(); //关闭外设
UartInit(); //初始化串口
Timer0Init();
//以下三句是开机串口功能初始化测试用:
printf("Welcome to stc15f2k60s2\n");
printf("%c",test+'0');
SendData(test+'0');
while(1)
{
if(URX_Over == 1)
{
URX_Over =0;
if(strncmp(URX,str1,7)==0) Uart_Sendstring("OVER\r\n");
else Uart_Sendstring("ERROR\r\n");
URX_Num = 0;
}
if(test_flag==1)
{
test_flag=0;
printf("the new test1 is %02bu\r\n the new test2 is %02bu\r\n ",(unsigned char)test1,(unsigned char)test2);
}
}
}其中最重要的拼接部分就是:
printf("the new test1 is %02bu\r\n the new test2 is %02bu\r\n ",(unsigned char)test1,(unsigned char)test2);下载后进行串口调试:效果如下:
 文章来源:https://www.toymoban.com/news/detail-459930.html
文章来源:https://www.toymoban.com/news/detail-459930.html
在此,我们的所有问题就这么解决了,希望各位看官多多三连支持!!文章来源地址https://www.toymoban.com/news/detail-459930.html
到了这里,关于蓝桥杯单片机串口通信学习提升笔记——部分2的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![[蓝桥杯单片机]学习笔记——555定时器与频率测量](https://imgs.yssmx.com/Uploads/2024/01/411635-1.png)