前文论述了智能车独轮车组自制编码器的可行性,昨天下单编码器今天就到货了,在此记录一下自制(抄板)年轻人的第一款编码器的历程。

这种商品店家自然是不可能提供原理图和PCB,能有尺寸图已经是非常好了。所以主要靠自己观察,好在构造本就很简单,传感器核心应该就是磁环和两个霍尔传感器,让我疑惑的是,磁铁只有两个磁极,而霍尔传感器一般针对一个磁极也只会有一种电平,这种编码器是如何转一圈输出很多个脉冲的?

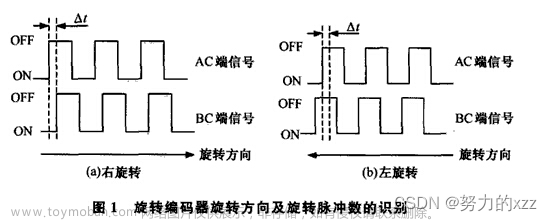
两种可能,第一种猜测:这个霍尔传感器比较特殊,根据磁极的大小分割了多段数字量自动输出脉冲,这样确实比较简单,但真的存在这样的传感器吗?如果是这样霍尔传感器的输出特性应当是:“磁场每变化一段,就输出一段高低电平脉冲”。这个逻辑显然不太好实现,对于小小的三条腿的基本传感器来说太复杂了。那就只能是第二种猜想:这个磁环不是常规磁铁,有好多对磁极。验证也很简单,用磁铁沿着一周走一圈就知道了。果然如此,我买的这个编码器是11线的,用磁铁固定一面沿着走一周确实明显分成了11段磁极。

这下就非常明了了,板子上的霍尔传感器的运行逻辑应当是“当检测到N极时输出高(低)电平,当检测到S极时输出低(高)电平”,符合这么一个小传感器的基本定位。基本的装配尺寸参考着这个模块稍微量一下就行。板子还有个非常重要的需要确定的就是两个传感器的位置,正交编码器要求两个传感器的输出波形有一个分明的相位差,就是说两个传感器的角度差不能是一对磁极夹角的整数倍。更理想的情况应该是,相位差刚好是一个磁极角度的一半。也就是说,对于N线的磁环,两个霍尔传感器的角度差应当是360/N*(B+0.25)或360/N*(B+0.75),B为0~(N-1)的整数。
比较方便买到的这款磁环是11线的,我直接选择了夹角为360*1.25/11来让两个传感器间距最小,这样便于腾出大片空间放学校队伍名和设计时间

由于PCB对装配尺寸要求比较高,且元件需要精准定位,所以先使用CAD绘制PCB板框和元件的定位参考

画出了磁极位置作为参考,可以看出,由360*1.25/11计算出的角度差可以让两个霍尔传感器保持1/4也就是8.17°的相位差。
理论数据推导完了,接下来就是简单愉快的画板时间,打开简单好用的立创EDA,找到霍尔传感器OH137,再用万用表蜂鸣器档测一下板上6个阻容的连接关系,两个电阻给AB相信号上拉,两个霍尔传感器的去耦电容,还有俩是AB相输出滤波电容。上拉电阻可以清晰看到512是5.1k的,滤波去耦电容不多说全是0.1uF。
文章来源地址https://www.toymoban.com/news/detail-461069.html

还有个接线座,本来考虑到小体积想要用ZH1.5,刚好无刷电机也是ZH1.5。不查不知道,ZH1.5竟然额定电流只有1A,电机的接口额定电流1A,好家伙之余也想到这可能也是无刷电机要用24V供电的原因吧。还是老老实实用XH2.54,其实板子尺寸倒没啥限制,毕竟电机是凸出在外面的。
按照实际需求小改一下CAD导入的板框,再稍微摆一摆元件的位置,随便拉两根线连上,PCB就搞定了。

最后不要忘了添加学校队伍名和日期,不能在丝印层,必须是铜箔层或者阻焊层,接下来就是等打板回来测试了。
文章来源:https://www.toymoban.com/news/detail-461069.html
到了这里,关于记录智能车自制霍尔编码器(PCB篇)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!