资料
淘宝链接请点这里
淘宝资料资料:
链接:https://pan.baidu.com/s/1Kda-c7QdZdQ03FBMa0zeRA
提取码:1234
pca9685pw介绍
这个模块是 I2C 通信控制 16 路 PWM 的模块。
所有路的 频率 是统一设置的,所以每一路的频率都一样,但是每一路可以设置不同的占空比。
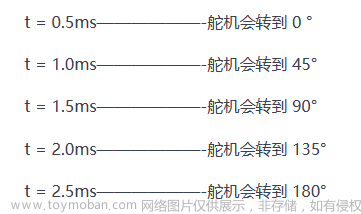
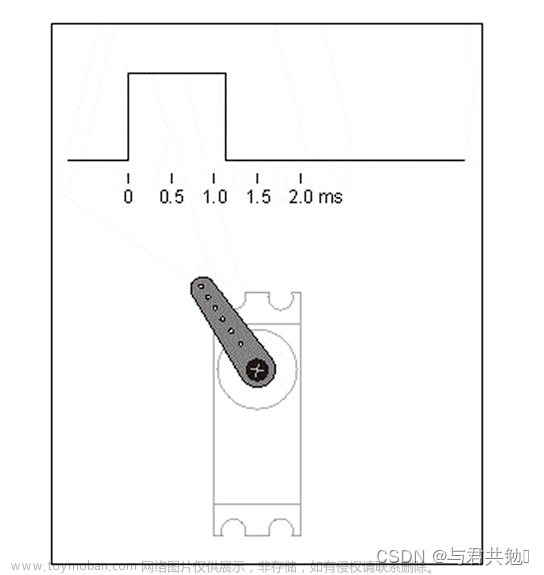
- PCA9685的分辨率是12位,即占空比控制时,0-4096对应的占空比为0-100,在控制舵机的时候,控制信号是0.5ms-2.5ms,周期 20ms,所以控制舵机角度不会有太高的分辨率,对舵机控制精度较高的地方不建议使用。
- PCA9685地址位和很多描述的不一样,根据芯片手册,地址位的寄存器一共 8 位,其中最高位固定是1,A0-A5这六位是用户可更改的,而其中最关键的一位是 R/W 位,这一位主要是决定了读还是写,置1时为读,置0时为写,所以我们在写程序的时候,PCA9685 的地址应把 R/W位加上,是 0x80,而不是 0x40,在写的时候,发送地址位是 0x80,在读的时候,发送的地址位是0x81。

硬件
硬件连接
- OE,低电平有效输出使能。
- SDA,I2C 的 SDA 引脚。
- SCL,I2C 的 SCL 引脚。
- V+,接入 5V 电源,若是驱动的 16 路全是舵机,这个电源的电流就要求很大了(不晓得这个模块到底能不能承受这么多舵机的电流)。
- VCC,单片机 3V3 电源。
- GND,对于 V+ 的地平面。
原理图截屏如下: 文章来源:https://www.toymoban.com/news/detail-464096.html
文章来源:https://www.toymoban.com/news/detail-464096.html
软件编写
pca9685pw.c
#include "pca9685pw.h"
#include <math.h>
#include <stdio.h>
#define min(_X_, _Y_) (_X_>=_Y_?_Y_:_X_)
static uint8_t read16(uint8_t addr);
static void write16(uint8_t addr, uint8_t d);
// 设置为true可打印一些调试消息,设置为false可禁用这些消息。
#define ENABLE_DEBUG_OUTPUT false
// 初始化。频率,转动角度(0~360)
void pca9685_init(float hz, uint16_t angle)
{
uint32_t off = 0;
// 这一步很关键,如果没有这一步PCA9685就不会正常工作。
pca9685_reset();
write16(PCA9685_MODE1,0x00);
pca9685_setPWMFreq(hz);
off = (uint32_t)(102.4+angle*1.14);
pca9685_setPWM(0,0,off);
pca9685_setPWM(1,0,off);
pca9685_setPWM(2,0,off);
pca9685_setPWM(3,0,off);
pca9685_setPWM(4,0,off);
pca9685_setPWM(5,0,off);
pca9685_setPWM(6,0,off);
pca9685_setPWM(7,0,off);
pca9685_setPWM(8,0,off);
pca9685_setPWM(9,0,off);
pca9685_setPWM(10,0,off);
pca9685_setPWM(11,0,off);
pca9685_setPWM(12,0,off);
pca9685_setPWM(13,0,off);
pca9685_setPWM(14,0,off);
pca9685_setPWM(15,0,off);
HAL_Delay(100);
}
// 软件复位
void pca9685_reset(void)
{
write16(PCA9685_MODE1, 0x0);
}
// 设置PCA9685的输出频率,
// PCA9685的16路PWM输出频率是一致的,
// 所以是不能实现不同引脚不同频率的。
void pca9685_setPWMFreq(float freq)
{
//printf("Attempting to set freq ");
//printf(freq);
// 输出周期实际是有误差的,对于20ms(50Hz)的周期来说这里乘个0.94为20ms
// 可以用示波器观看调试
freq *= 0.942;
double prescaleval = 25000000;
prescaleval /= 4096;
prescaleval /= freq;
prescaleval -= 1;
if (ENABLE_DEBUG_OUTPUT)
{
printf("Estimated pre-scale: %f\r\n", prescaleval);
}
// floor()总是返回小于等于一个给定数字的最大整数。
// 这里是四舍五入
uint8_t prescale = floor(prescaleval + 0.5);
if (ENABLE_DEBUG_OUTPUT)
{
printf("Final pre-scale: %d\r\n", prescale);
}
uint8_t oldmode = read16(PCA9685_MODE1);
uint8_t newmode = (oldmode&0x7F) | 0x10; // sleep
write16(PCA9685_MODE1, newmode); // go to sleep
write16(PCA9685_PRESCALE, prescale); // set the prescaler
write16(PCA9685_MODE1, oldmode);
HAL_Delay(5);
write16(PCA9685_MODE1, oldmode | 0xa1); // This sets the MODE1 register to turn on auto increment.
// This is why the beginTransmission below was not working.
// printf("Mode now 0x"); printf(read16(PCA9685_MODE1), HEX);
}
// 输出PWM占空比的调节。通常on都设为0,改变off即可。
// 因为PCA9685是12位分辨率,所以off的值0~4096就代表了占空比0-100.
void pca9685_setPWM(uint8_t num, uint16_t on, uint16_t off)
{
//printf("Setting PWM "); printf(num); printf(": "); printf(on); printf("->"); printf(off);
uint8_t d[4] = {(on&0xFF), (on>>8), (off&0xFF), (off>>8)};
HAL_I2C_Mem_Write(&PCA9685_HI2C, PCA9685_IIC_ADDR_W, (LED0_ON_L+4*num), 1, d, 4, 0xff);
}
// num:序号;angle:角度
void setAngle(uint8_t num, uint16_t angle)
{
// 补误差
// angle /= 2;
uint32_t off = 0;
// off范围是:0~4096
// 舵机占空比范围是:0.5~2.5ms
// 所以设置off在 102.4~512范围内
// x/(512-102.4) = 1/360
// 所以每一度步进值为:1.137777 约等于 1.14
off = (uint32_t)(102.4+angle*1.14);
pca9685_setPWM(num, 0, off);
}
static uint8_t read16(uint8_t addr)
{
uint8_t d;
HAL_I2C_Mem_Read(&PCA9685_HI2C, PCA9685_IIC_ADDR_R, addr, 1, &d, 1, 0xff);
return d;
}
static void write16(uint8_t addr, uint8_t d)
{
HAL_I2C_Mem_Write(&PCA9685_HI2C, PCA9685_IIC_ADDR_W, addr, 1, &d, 1, 0xff);
}
pca9685pw.h
#ifndef _PCA9685_PW_H
#define _PCA9685_PW_H
#include "stdbool.h"
#include "main.h"
#include "i2c.h"
// I2C 句柄,用户自己修改
#define PCA9685_HI2C hi2c1
// I2C 地址
#define PCA9685_IIC_ADDR_W 0x80
#define PCA9685_IIC_ADDR_R 0x81
// 寄存器地址
#define PCA9685_SUBADR1 0x2
#define PCA9685_SUBADR2 0x3
#define PCA9685_SUBADR3 0x4
#define PCA9685_MODE1 0x0
#define PCA9685_PRESCALE 0xFE
#define LED0_ON_L 0x6
#define LED0_ON_H 0x7
#define LED0_OFF_L 0x8
#define LED0_OFF_H 0x9
#define ALLLED_ON_L 0xFA
#define ALLLED_ON_H 0xFB
#define ALLLED_OFF_L 0xFC
#define ALLLED_OFF_H 0xFD
// 函数
void pca9685_reset(void);
void pca9685_setPWMFreq(float freq);
void pca9685_setPWM(uint8_t num, uint16_t on, uint16_t off);
void pca9685_setPin(uint8_t num, uint16_t val, bool invert);// =false
// 初始化。频率,转动角度(0~360)
void pca9685_init(float hz, uint16_t angle);
// num:序号;angle:角度(0~360)
void setAngle(uint8_t num,uint16_t angle);
#endif /* _PCA9685_PW_H */
main
void main(void)
{
uint16_t xxx = 0;
// 初始50Hz,角度 180 度
pca9685_init(50, 180);
while(1)
{
// 设置 1 号口输出
setAngle(1, xxx);
xxx += 10;
xxx>360?xxx=0:xxx;
HAL_Delay(10);
}
}
参考
PCA9685模块使用(Arduino和STM32)文章来源地址https://www.toymoban.com/news/detail-464096.html
到了这里,关于cubemx stm32 pca9685pw模块 16路PWM 可用于舵机驱动 驱动代码的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!




![12.[STM32]PWM脉宽调制-舵机控制(一篇足以)](https://imgs.yssmx.com/Uploads/2024/01/414539-1.png)