1、AD相关简介
1.1、什么是AD转换?
(1)A是指analog、模拟的;D是指digital、数字的。
(2)现实世界是模拟的,连续分布的,无法被分成有限份;计算机世界是数字的,离散分布的,是可以被分成有限份的;
(3)AD转换就是把一个物理量从模拟的转换成数字的。
1.2、AD转换的意义
自然界多数是模拟量,为了方便计算机处理,人为的数字化了自然界的模拟量。
1.3、STC89C516
该单片机本身引脚没有模拟的,所以模拟量不能直接给该单片机。后续很多新的单片机都具有模拟输入输出的引脚,引脚会对应相应的AD转换。
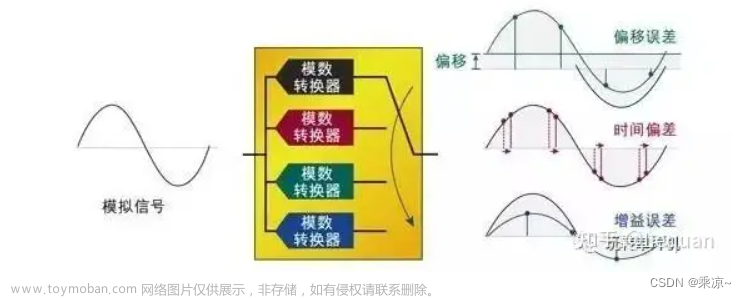
1.4、AD转换原理
(1)采用比较器电路进行AD转换。
1.5、AD转换中的主要概念
(1)位数: AD转换后转出来的数由几位二进制来表示。位数越多,越细腻,精度越高。
(2)量程:AD转换器可以接受的模拟量的范围。
(3)精度:简单理解就是转出来到底有多准
(4)分辨率:AD转换器转出来的二进制数,每一格表示多少
(5)转换速率(转换时间)
1.6、AD转换在系统中存在的方式
(1)CPU外部扩展专用AD芯片
(2)CPU内部集成AD模块(内部外设)
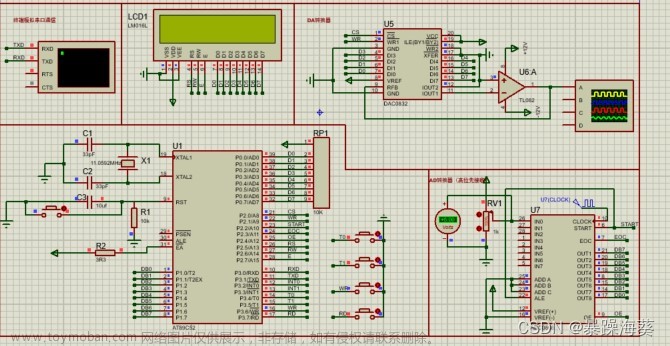
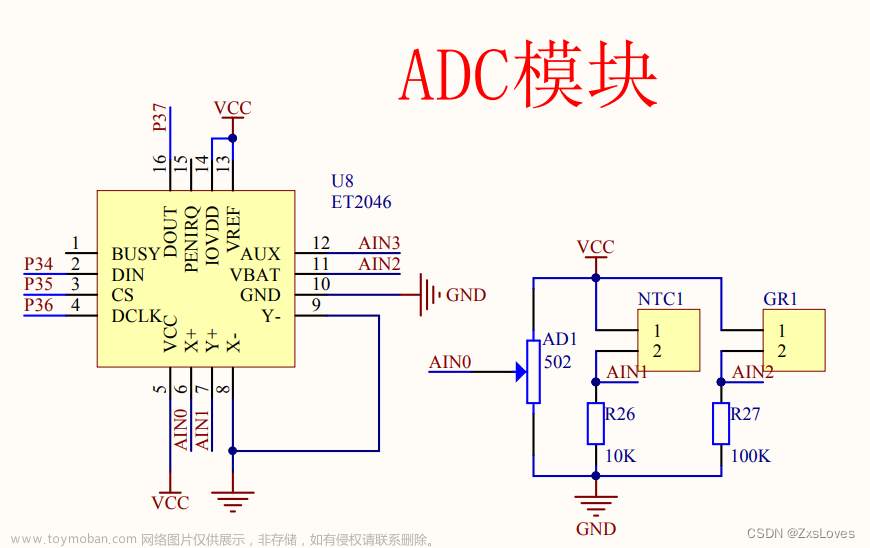
2、原理图
2.1、简介
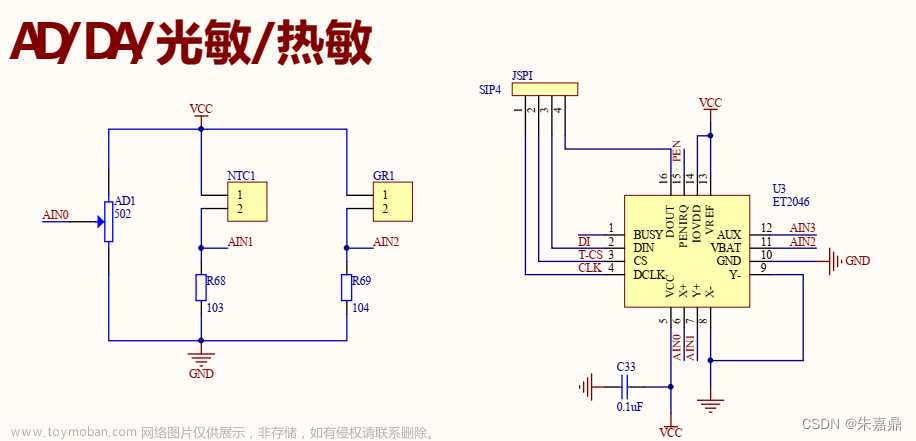 (1)ET2046是我们外接的AD转换芯片。
(1)ET2046是我们外接的AD转换芯片。
(2)AIN0、AIN1、AIN2为三路AD转换。
(3)AD1502是一个滑动变阻器;NTC1是一个热敏电阻;GR1是一个光敏电阻。
2.2、接线
(1)CLK 接P1.0、T-CS接P1.1、DI接P1.2、DOUT接P1.3。
(2)CLK为SPI时钟线。
(3)T-CS为使能线。
(4)DI是数字输入线,DOUT是数字输出线。
3、ET2046数据手册
该芯片已停产,官网没搜到,数据手册链接:ET2046 - 百度文库
(1)ET2046是4线触摸屏控制器,在此用于AD转换。ET2046是一个经典的逐次逼近寄存器模数转换器。
(2)转换器模拟通道:X-、Y-、Z坐标、辅助输入(AUX)、电池电压(VBAT)、芯片温度。通过一个多路选择器提供。
(3)控制字
| bit7 | 固定为1 |
| bit6-4 | A2-A0,选择模拟通道 |
| bit3 | 设置采样位数。0表示12bit,1表示8bit |
| bit2 | 为1表示用单端模式,为0表示差分模式。此处用单端模式。 |
| bit1-0 | power down模式使能,00表示使能。 |
4、示例程序
通过ET2046将模拟电压值转换位12bit数字量,并通过串口以文本方式显示。
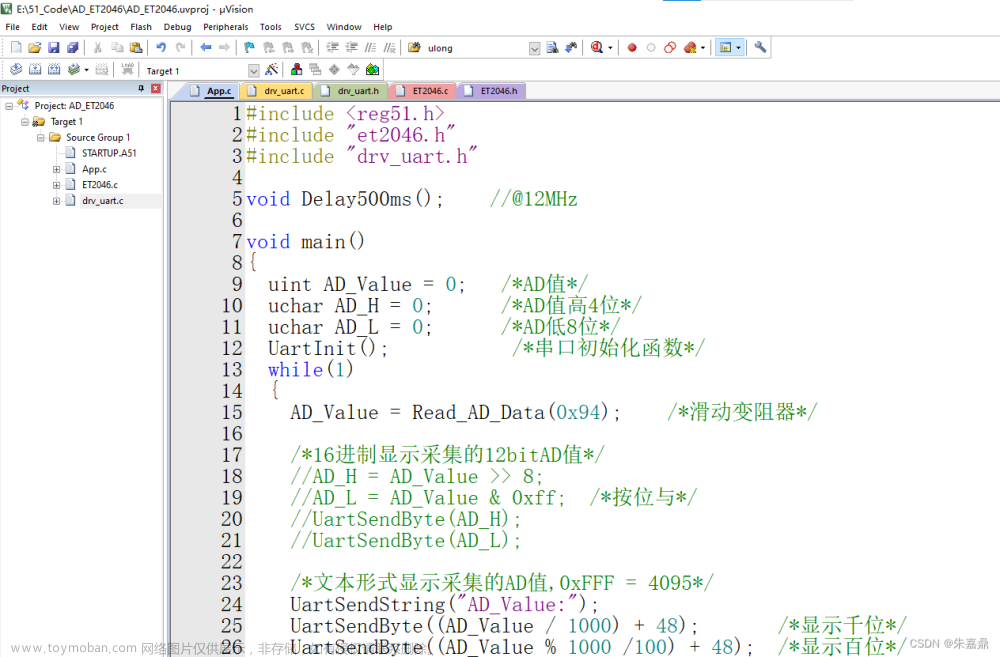
(1)app.c文件
#include <reg51.h>
#include "et2046.h"
#include "drv_uart.h"
void Delay500ms(); //@12MHz
void main()
{
uint AD_Value = 0; /*AD值*/
uchar AD_H = 0; /*AD值高4位*/
uchar AD_L = 0; /*AD低8位*/
UartInit(); /*串口初始化函数*/
while(1)
{
AD_Value = Read_AD_Data(0x94); /*滑动变阻器*/
/*16进制显示采集的12bitAD值*/
//AD_H = AD_Value >> 8;
//AD_L = AD_Value & 0xff; /*按位与*/
//UartSendByte(AD_H);
//UartSendByte(AD_L);
/*文本形式显示采集的AD值,0xFFF = 4095*/
UartSendString("AD_Value:");
UartSendByte((AD_Value / 1000) + 48); /*显示千位*/
UartSendByte((AD_Value % 1000 /100) + 48); /*显示百位*/
UartSendByte((AD_Value % 100 /10) + 48); /*显示十位*/
UartSendByte((AD_Value % 10 ) + 48); /*显示个位*/
UartSendString(".\r\n");
Delay500ms();
}
}
void Delay500ms() //@12MHz
{
unsigned char i, j, k;
_nop_();
i = 4;
j = 205;
k = 187;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
(2)ET2046.c文件
#include "ET2046.h"
/*
*功能:SPI写字节函数
*参数: Data:写入的数据
*返回值:无
*/
void SPI_WriteByte(uchar Data)
{
uchar i = 0; /*用于for循环*/
CLK = 0;
for(i=0; i<8; i++)
{
DIN = Data >> 7; //从高位到低位写入
Data <<= 1;
CLK = 0; //上升沿放置数据
CLK = 1;
}
}
/*功能:SPI读12bit
*参数:无
*返回值:读取到的数据
*/
uint SPI_Read(void)
{
uint i = 0; /*用于for循环*/
uint Data = 0; /*暂存读取到的书*/
CLK = 0;
for(i=0; i<12; i++) /*接收12位数据*/
{
Data <<= 1;
CLK = 1;
CLK = 0;
Data |= DOUT;
}
return Data;
}
/*
*功能:读取AD值
*参数: cmd:读取对应通道发送的控制字
*返回值:读取的AD值
*/
uint Read_AD_Data(uchar cmd)
{
uchar i = 0; /*用于for循环*/
uint AD_Value; /*记录AD的值*/
CLK = 0;
CS = 0;
SPI_WriteByte(cmd);
for(i=6; i>0; i--); /*延时等待转换结果*/
CLK = 1; /*发送一个时钟周期,清除BUSY*/
_nop_();
_nop_();
CLK = 0;
_nop_();
_nop_();
AD_Value=SPI_Read();
CS = 1;
return AD_Value;
}
(3)ET2046.h文件
#ifndef __ET2046_H__
#define __ET2046_H__
/*头文件包含*/
#include <reg51.h>
#include <intrins.h>
/*宏定义*/
#define uchar unsigned char
#define uint unsigned int
/*定义使用的IO口*/
sbit CLK = P1^0; //时钟
sbit CS = P1^1; //片选
sbit DIN = P1^2; //输入
sbit DOUT = P1^3; //输出
/*函数声明*/
void SPI_WriteByte(uchar Data); /*SPI写字节函数*/
uint SPI_Read(void); /*SPI读12bit*/
uint Read_AD_Data(uchar cmd);
#endif
(4)drv_uart.c文件
#include "drv_uart.h"
#include <reg51.h>
/*
*功能:串口初始化函数,8数据位,1停止位,无校验位,波特率4800
*参数:无
*返回值:无
*/
void UartInit(void)
{
SCON = 0x50; //串口工作在模式1,8位数据位,允许串行接收
PCON = 0x80; //波特率加倍
TMOD = 0x20; //设置T1为模式2
TH1 = 243; //波特率4800 ,TH1 = 晶振频率/12/32/波特率
TL1 = 243; //8位自动重装,意识是TH1用完了之后下一个周期TL1会自动重装到TH1去。
TR1 = 1; //开启定时器1
ES = 1; //打开串口中断
EA = 1; //打开总中断
}
/*
*功能:通过串口发送一个字节数据
*参数:需要发送的内容
*返回值:无
*/
void UartSendByte(unsigned char Dat)
{
SBUF = Dat; //准备好需要发送的一个字节
while(TI == 0); //确认串口发送没有再忙,while循环需要加超时判断
TI = 0; //软件复位TI标志位
}
/*
*功能:通过串口发送字符串
*参数:待发送的字符串
*返回值:无
*/
void UartSendString(unsigned char *str)
{
while(*str != '\0') //等待字符串发完*/
{
UartSendByte(*str); //发送一个字符
str++; //指针指向下一个字符
}
}
/*
*功能:串口中断接收函数
*参数:无
*返回值:无
*注意:中断函数通过中断编号识别,中断编号可通过查数据手册得到
*/
void Uart_Isr() interrupt 4
{
unsigned char ReceiveBit;
if(RI == 1)
{
ReceiveBit = SBUF; //读取SBUF,读取串口接收到的一个字节
RI = 0;
}
//UartSendByte(ReceiveBit); //接收到的内容原封不动发回去
}
(5)drv_uart.h文件
#ifndef __DRV_UART_H__
#define __DRV_UART_H__
/*函数声明*/
void UartInit(void); /*串口初始化函数*/
void UartSendByte(unsigned char Dat); /*通过串口发送一个字节数据*/
void UartSendString(unsigned char *str); /*通过串口发送字符串*/
#endif
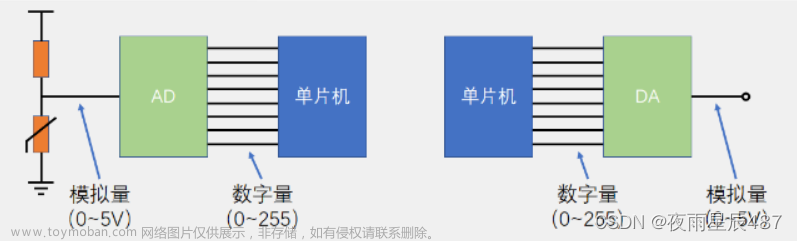
5、AD转换涉及的值
(1)AD转换芯片引脚输入一个模拟量,这个模拟值本质上讲是电压,根据AD转换的位数,电压值对应一个AD值(数字量)。
(2)AD转换输入的模拟量(电压值),有时会受一些物理量的影响。所以物理量的值对应电压值。文章来源:https://www.toymoban.com/news/detail-464235.html
例如:光敏电阻光强不同,采集到的电压也会不相同。即光强度对应电压值。文章来源地址https://www.toymoban.com/news/detail-464235.html
到了这里,关于十四、51单片机之AD转换的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!