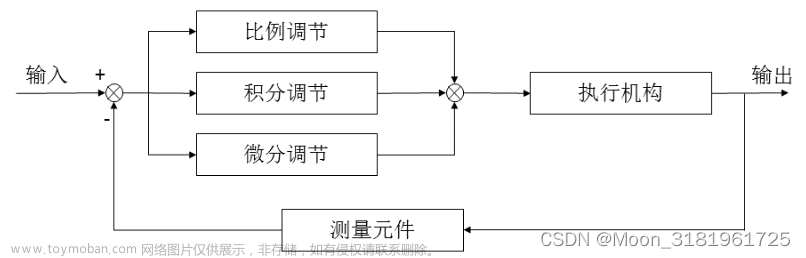
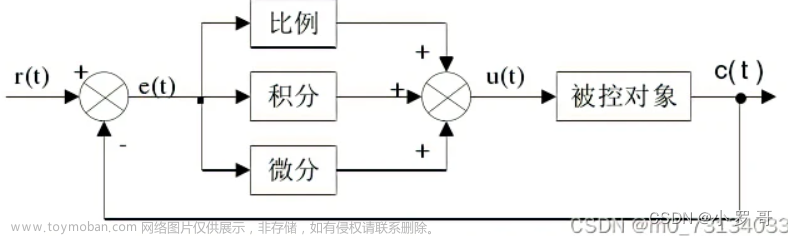
这里展示如何设计一个简单的PID控制器。
传递函数如下:
s
y
s
=
1
(
s
+
1
)
3
sys=\frac{1}{(s+1)^3}
sys=(s+1)31
首先,创建模型并选用PI控制器:
sys = zpk([],[-1 -1 -1],1);
[C_pi,info] = pidtune(sys,'PI') % pidtune整定函数
生成结果如下:
(交叉频率约为0.52 rad/s,相位裕度为60)

检查受控系统的闭环阶跃响应:
T_pi = feedback(C_pi*sys, 1);
step(T_pi)

为了缩短响应时间,可以设置比自动选择的结果更高的目标交叉频率,即0.52。将交叉频率增加到 1.0。
定义c_pi_fast:
[C_pi_fast,info] = pidtune(sys,'PI',1.0)

新控制器可实现更高的交叉频率,但代价是相位裕量减小。
将两个控制器的闭环阶跃响应进行比较。
T_pi_fast = feedback(C_pi_fast*sys,1);
step(T_pi,T_pi_fast)
axis([0 30 0 1.4])
legend('PI','PI,fast')
这种性能降低的结果是,PI控制器没有足够的自由度在1.0 rad/s的交叉频率下实现良好的相位裕量。添加微分操作可改善响应。
将 PIDF 控制器设计为目标交叉频率为 1.0 rad/s。
[C_pidf_fast,info] = pidtune(sys,'PIDF',1.0)

可以看出,在微分作用下, 算法的交叉频率和相位裕量都达到了较好值。
比较pi_fast 和 pidf_fast两个控制器的闭环阶跃响应:
T_pidf_fast = feedback(C_pidf_fast*sys,1);
step(T_pi_fast, T_pidf_fast);
axis([0 30 0 1.4]);
legend('PI,fast','PIDF,fast');

可以将受控系统的输入(负载)抗扰度添加到快速 PI 和 PIDF 控制器再次进行比较:文章来源:https://www.toymoban.com/news/detail-464297.html
S_pi_fast = feedback(sys,C_pi_fast);
S_pidf_fast = feedback(sys,C_pidf_fast);
step(S_pi_fast,S_pidf_fast);
axis([0 50 0 0.4]);
legend('PI,fast','PIDF,fast');

以上。文章来源地址https://www.toymoban.com/news/detail-464297.html
到了这里,关于【Matlab】简单PID 控制器设计(控制系统工具箱)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!