概述
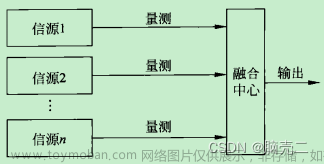
多传感器数据融合技术形成于上世纪80年代,目前已成为研究的热点。它不同于一般信号处理,也不同于单个或多个传感器的监测和测量,而是对基于多个传感器测量结果基础上的更高层次的综合决策过程。把分布在不同位置的多个同类或不同类传感器所提供的局部数据资源加以综合进行分析,消除多传感器信息之间可能存在的冗余和矛盾,加以互补,降低不确实性,获得被测对象的一致性描述,从而提高系统决策、规划、反应的快速性和正确性,使系统获得更充分的信息,从而进行下一步的专家诊断和模式识别。多源数据融合是指将来自不同传感器、设备或算法等多种数据进行集成和融合,从而得到更全面、更精确、更可靠的信息。
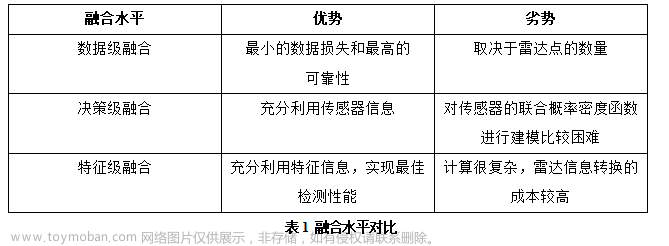
多源数据融合在现代信息处理中具有重要作用,已经广泛应用于各种领域,例如智能交通、智慧城市、军事作战、医学诊断等。本文将综述多源数据融合的相关技术和方法,系统分析其优缺点及应用领域。多源数据融合技术主要包括传感器级别、特征级别和决策级别三个层次。传感器级别是指将来自不同传感器的原始数据进行集成和融合,在这一层次使用的方法包括加权平均法、可变权重法、模型预测和模糊推理等。特征级别是指将来自不同传感器的数据进行特征提取和描述,并将提取的特征进行融合,常用的方法包括主成分分析(PCA)、独立成分分析(ICA)、小波变换、神经网络等。决策级别是指将来自不同传感器的数据进行决策策略处理和集成,主要使用的方法包括贝叶斯理论、Dempster-Shafer证据理论、模糊逻辑等。
多源数据融合的优点
(1)提高了数据的可靠性和准确性。多源数据融合可以同时处理多种类型的信息,生成与真实情况更加接近的结果。
(2)降低了数据误差,并减少了遗漏情况。多源数据融合可以对数据进行分析和检查,发现并减少了数据中的错误和遗漏情况。
(3)节约了成本和时间。多源数据融合可以同时处理多种数据,减少了花费在处理数据上的成本和时间。
(4)提高了系统的可扩展性和可靠性。多源数据融合将各类数据集成到一起,保证了算法准确性和可靠性。
多源数据融合也存在缺点
(1)处理流程复杂。多源数据融合涉及到多领域的知识,融合流程相对较复杂。
(2)需要更多的计算资源。在数据融合的过程中需要大量的计算资源,并且采用复杂的算法,处理速度较慢。
(3)需要面临数据不一致和不标准问题。多源数据融合时面临数据的不一致和不标准问题,如数据缺失和数据扭曲等,需要进行有效的数据清洗和处理。
多源数据融合的应用
在各个应用领域,多源数据融合已经得到了广泛应用。例如,在智能交通领域,多源数据融合已经被广泛应用于车载装置、交通监控、导航系统等;在医学领域,多源数据融合已经被应用于医学诊断、治疗方案制定等方面。此外,多源数据融合在军事作战、智慧城市、灾害管理等领域也有广泛的应用。
多源数据融合是一种重要的数据处理方式,将来自不同传感器的信息组合起来,从而增强可感知的情况的能力。在未来的发展中,需要针对不同应用领域和不同级别的数据进行多源数据融合,不断优化和改进多源数据融合技术和方法,提高数据融合的效率和准确率。
常见的多传感器信息融合方法
(1)基于贝叶斯定理的信息融合方法,该方法通常基于贝叶斯理论,将来自不同传感器的信息通过贝叶斯公式进行融合。
(2)基于卡尔曼滤波的信息融合方法,该方法通常将来自不同传感器的信息建模为状态估计问题,通过扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF)等方法进行融合。
(3)基于模型的信息融合方法,该方法利用模型描述传感器的响应,并使用参数拟合方法将融合成一个全局模型。
(4)基于决策理论的信息融合方法,该方法利用决策理论来处理来自不同传感器的信息,它可以通过使用最佳决策规则来提高准确性。
(5)基于聚类的信息融合方法,该方法通过找到相似的传感器测量值来合并信息,并将它们汇总为一个表示全局状态的单个数据。
(6)基于神经网络的信息融合方法,利用神经网络技术可以处理不同传感器的信息,并提高最终结果的准确性。
每个方法的优缺点和适用场景,具体方法的选择应根据实际情况进行评估
(1)基于贝叶斯定理的信息融合方法
典型特征:基于概率论和贝叶斯公式,实现信息的融合。
优点:对于不同类型的传感器数据,例如离散数据、连续数据和混合数据,提供良好的统一性,可适用于多种信号融合的场景。
缺点:要求确定严格的先验概率,可能较难确定合适的先验概率,从而导致融合结果的偏差。
适用场景:适用于多传感器的低维度数据,如所在位置、位姿、速度、方向等数据,以及多传感器信息的融合问题。
(2)基于卡尔曼滤波的信息融合方法
典型特征:基于贝叶斯滤波理论,通过对状态空间进行递归估计,实现多维度数据融合。
优点:算法简单、计算速度快,对短时刻测量不准确的问题有很好的估计性能,具有一定的鲁棒性。
缺点:只适用于线性系统,且系统必须满足高斯白噪声模型等苛刻假设,不适用于非线性、非高斯模型的系统。
适用场景:适用于多传感器数据存在较强相关性的,如位置、高度、速度等较为单一的物理量。适用于需要实时反映状态变化的场景。
(3)基于模型的信息融合方法
典型特征:利用传感器数据和模型数据共同组成增广的状态向量,然后利用最小二乘法求解模型的参数,进而实现数据融合。
优点:对于不同类型的传感器数据,如可见光图像、红外图像、雷达数据等,具有较好的适应性,可以实现对多传感器数据的准确融合。
缺点:需要准确的物理模型,因此局限性较大。
适用场景:适用于物理系统的数据融合,如机械臂、无人机等物理系统的位置、角度等数据。
(4)基于决策理论的信息融合方法
典型特征:将多传感器数据看作是一种不同的决策选择,通过评估不同决策的收益和效益,最终选择最优决策。
优点:可针对特定的目标和环境进行针对性的处理,并可以与传统算法进行结合,从而提高融合结果的准确性。
缺点:对于传感器本身的误差具有较大的敏感性,同时,选择合适的收益函数也比较困难。
适用场景:适用于需要对不同传感器数据进行复杂的决策并选择最优决策的情况。
(5)基于聚类的信息融合方法
典型特征:将来自不同传感器的数据聚类,通过合并在同一类别中的数据进行信息融合。
优点:可自适应地对不同传感器的数据进行分组,适用于多源数据分析的场景,并能够处理异构数据的融合问题。
缺点:对于数据量大且密度变化较大的数据集,聚类效果可能不理想。
适用场景:适用于样本比较充分、传感器相关性不强的情况,如DNA信号处理、生物信息学等领域。文章来源:https://www.toymoban.com/news/detail-464427.html
(6)基于神经网络的信息融合方法
典型特征:将多传感器数据组成一个输入向量,通过神经网络的学习,进而得到融合结果。
优点:可以自适应学习传感器之间的相关性,同时,对于优越的神经网络与算法模型,精度较高。
缺点:需要足够多的数据进行训练,且模型鲁棒性较差,一旦出现偏差,对融合结果有较大影响。
适用场景:适用于多模态数据的融合问题,如图像和语音的联合处理、传感器网络的数据融合等问题。文章来源地址https://www.toymoban.com/news/detail-464427.html
到了这里,关于多传感器数据融合技术的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!