实验报告书
| 一、实验内容与目的 实验内容: 通过对Exynos4412的PWM的操作,控制实验箱的蜂鸣器实现发声,并播放音乐。 实验目的:
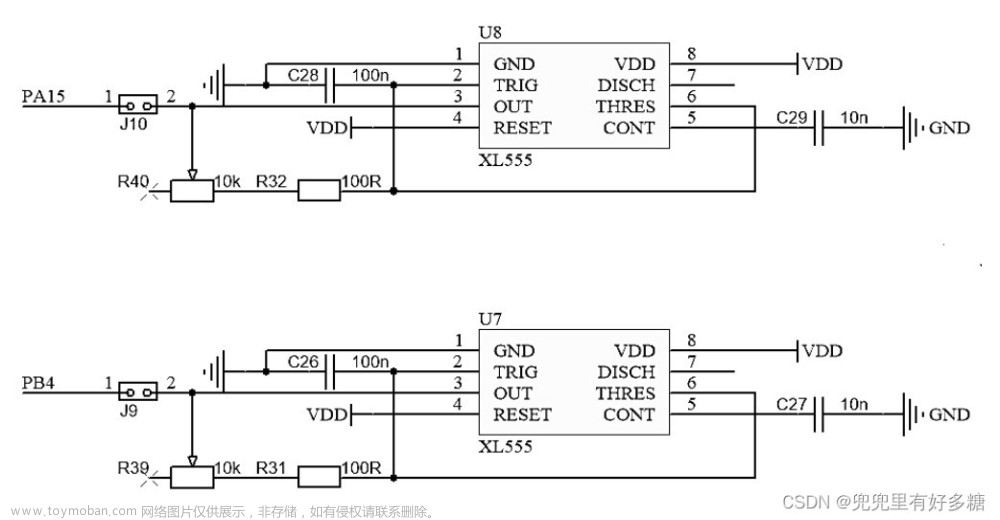
二、实验原理与程序(原理图、程序流程图、程序等) PWM0_BUZZER原理图:(底板原理图)
其连接引脚XpwmTOUT0_C(底板原理图)
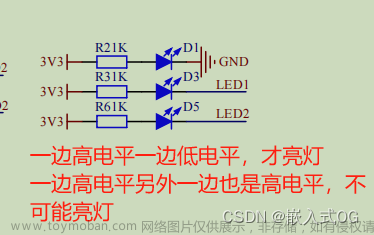
Exynos4412原理图:
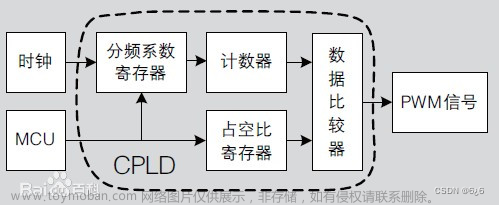
得:PWM0_BUZZER>>XpwmTOUT0_C>>GPD0_0 程序流程图:
程序代码: 驱动文件的核心代码: ①初始化函数:init static int fs4412_pwm_io_init() { writel((readl(pwm->gpd0con) & ~(0xf)) | 0x2,pwm->gpd0con); //设置GPD0CON控制寄存器[3:0]的值为0x2, 则TOUT0信号会输出PWM信号。 writel((readl(pwm->timer_base+TCFG0) & ~(0Xff) | 0xc7,pwm->timer_base+TCFG0); //一级分频 分频值为199 即200分频 199的16进制为0xC7 writel((readl(pwm->timer_base + TCFG1) & ~(0xf) | 0x2,pwm->timer_base + TCFG1); //二级分频,选分频值为1/2 即2分频 writel(600,pwm->timer_base+TCNTB0); //pwm初值为600 writel(300,pwm->timer_base+TCMPB0); //pwm电平翻转值为300 writel(readl(pwm->timer_base+TCON) & ~(0xf) | 0x2,pwm->timer_base+TCON); //定时器手动更新,即加载TCNTB0 和 TCMPB0的值 return 0; } ②与驱动程序相关联的函数:ioctl static long fs4412_pwm_ioctl(struct file *file, unsigned int cmd, unsigned long arg) { int data; if (_IOC_DIR(cmd) == _IOC_WRITE) if (copy_from_user(&data, (void *)arg, sizeof(data))) return -EFAULT; switch(cmd) { case PWM_ON: writel(readl(pwm->timer_base+TCON) & ~(0xf) | 0x9,pwm->timer_base+TCON); //设置寄存器TCON,使定时器开启,并启用自动重载 break; case PWM_OFF: writel(readl(pwm->timer_base+TCON) & ~(0xf) ,pwm->timer_base+TCON); //设置寄存器TCON,使定时器关闭,低四位清零 break; case SET_PRE: writel(readl(pwm->timer_base+TCFG0) & ~(0xff) | (data & 0xff),pwm->timer_base+TCFG0); //设置寄存器TCFG0的值,低八位先清零,再根据应用程序数据传过来的数据进行低八位设置 writel(readl(pwm->timer_base+TCON) & ~(0xf) | 0x9,pwm->timer_base+TCON); //定时器开启,并启用自动重载 break; case SET_CNT: writel(data,pwm->timer_base+TCNB0); //设置pwm定时器的初值TCNB0 writel(data/2,pwm->timer_base+TCMPB0); //设置pwm定时器的翻转值TCMPB0 break; } return 0; } ③标记化赋值函数(作用:提供文件系统入口点函数,就可访问设备驱动程序):fops static struct file_operations fs4412_pwm_fops = { .owner = THIS_MODULE, .open = fs4412_pwm_open, .release = fs4412_pwm_rlease, .unlocked_ioctl = fs4412_pwm_ioctl, }; 驱动文件Makefile文件代码: obj-m := fs4412_pwm.o KERNELDIR := /CBT-SuperIOT/linux-3.5 default: make -C $(KERNELDIR) M=$(shell pwd) modules clean: rm -rf *.o *.ko *.mod.* modules.* Mo*.* 应用程序的核心代码: //打开pwm定时器cmd为 PWM_ON ,入口函数int ioctl(int fd ,int cmd ) ; ioctl(dev_fd,PWD_ON); //设置pwm定时器的频率,cmd为SET_PRE入口函数int ioctl(int fd , int cmd , char *argp ); ioctl(dev_fd,SET_PRE,&pre); while (1){ for(i = 0;i<sizeof(MotherLoveMeOnceAgain)/sizeof(Note);i++ ) { div = (PCLK/199/2)/(MotherLoveMeOnceAgain[i].pitch); //设置pwm定时器的CNT值, cmd为SET_CNT,把div作为参数传入入口函数int ioctl(int fd , int cmd , char *argp ); ioctl(dev_fd,SET_CNT,&div); usleep(MotherLoveMeOnceAgain[i ].dimation *50); } 应用程序Makefile文件代码: CC = arm-linux-gcc TARGET = All OBJECT = pwm_test.o $(TARGET):$(OBJECT) $(CC) $(OBJECT) -o pwm_test $(OBJECT):test_pwm.c $(CC) -c test_pwm.c -o $(OBJECT) clean: rm *.o pwm_test | |||||||
| 三、实验操作步骤 硬件驱动编译、加载、运行步骤
编写fs4412_pwm.c驱动文件在pc端的Linux系统下编写 编写驱动文件的编译文件Makefile 使用make命令运行Makefile文件,使fs4412_pwm.c文件生成pwm.ko的内核模块文件
编写pwm_test.c驱动文件在pc端的Linux系统下编写 编写驱动文件的编译文件Makefile,make一下 配置交叉开发环境 ①连接Cortex-A9的3根线:电源线、串口线、网线。 ②配置网络IP地址。
③使用XShell来连接Cortex-A9,并将PC Linux系统下的/CBT-SuperIOT目录挂载到Cortex-A9系统下的/mnt目录下
将内核文件加载到Linux系统的内核里面:insmod adc.ko
生成设备文件mknod /dev/pwm c 500 0
进入adc应用程序的目录中运行:./pwm_test 四、实验结果与总结 实验结果: 蜂鸣器可播放pwm_music.h文件的音乐。文章来源:https://www.toymoban.com/news/detail-465029.html 实验总结:文章来源地址https://www.toymoban.com/news/detail-465029.html
|
|||||||




到了这里,关于嵌入式PWM实验报告的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!