前言
实验所用软件版本:ansys10.0
一、实验说明
(一)基本思路
有限元分析的最终目的是还原一个实际工程系统的数学行为特征,即分析必须针对一个物理原型准确的数学模型。广义上讲,模型包括所有节点、单元、材料属性、实常数、边界条件,以及其他用来表现这个物理系统的特征。
建立模型的典型步骤:
(1)确定分析目标及模型的基本形式,选择合适的单元类型并考虑如何建立适当的网格密度。
(2)进入前处理(PREP7)建立模型,一般情况下利用实体建模创建模型。
(3)建立工作平面。
(4)利用几何元素和布尔运算操作生成基本几何形状。
(5)激活适当的坐标系。
(6)用自底向上方法生成其他实体,即定义关键点后生成线、面和体。
(7)用布尔运算或编号控制适当地连接各个独立的实体模型域。
(8)生成单元属性表。
(9)设置单元属性指针。
(10)设置网格划分控制以建立需要的网格密度。若需用自动网格划分功能,应在 退出前处理后激活自适应网格划分。
(11)通过划分实体模型的网格生成节点和单元。
(12)在生成节点和单元后定义面与面的接触单元、自由度耦合及约束方程等。
(13)保存模型数据为 Jobname.DB
(14)退出前处理
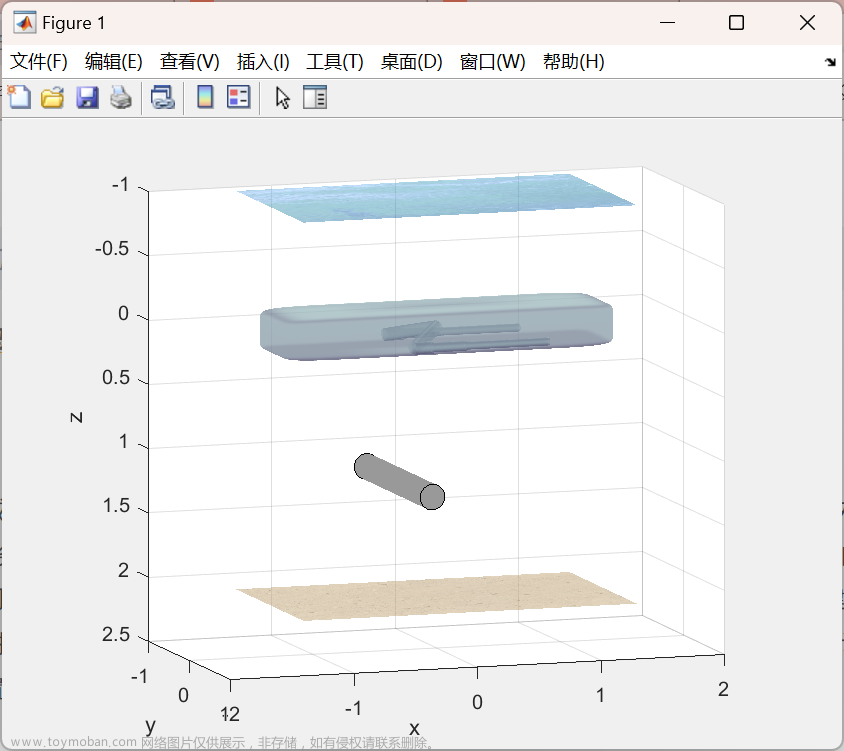
(二)实验问题模型图
 文章来源:https://www.toymoban.com/news/detail-465127.html
文章来源:https://www.toymoban.com/news/detail-465127.html
二、实验内容与步骤
(一)创建 2D 模型
- 生成3个矩形面:Main Menu > Preprocessor > Modeling > Create > areas > Rectangle > By Dimensions。弹出Create Rectangle By Dimensions对话框。依次输入三个平面的参数,单击Apply,如图所示。


 文章来源地址https://www.toymoban.com/news/detail-465127.html
文章来源地址https://www.toymoban.com/news/detail-465127.html
到了这里,关于玩转ansys——微机械车轮的实体建模与网格化的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!