Open3D 实现建筑物点云立面和平面分割提取
点云数据在现实场景中广泛应用,例如建筑物三维重建、智能交通等领域。然而,点云数据量庞大且噪声较多,因此需要对其进行处理和分析。Open3D 是一款开源的跨平台点云处理库,在点云数据预处理、三维重建和可视化等方面有着丰富的功能。本文将介绍如何使用 Open3D 对建筑物点云进行立面和平面分割提取。
首先,我们需要导入必要的库和数据。这里使用 Open3D 提供的 PCD 格式点云数据进行演示。
import open3d as o3d
pcd = o3d.io.read_point_cloud("building.pcd")
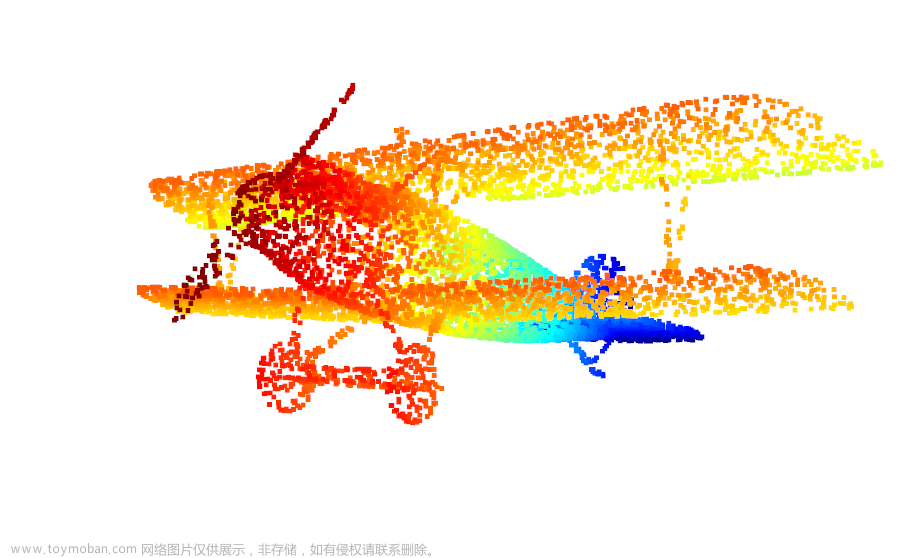
o3d.visualization.draw_geometries([pcd])
通过 o3d.visualization.draw_geometries 函数可视化导入的点云数据,如下图所示。
接下来,使用 RANSAC 算法进行平面分割提取。RANSAC 旨在通过随机抽样和最小二乘拟合来估计数据模型的参数,从而得到数据中符合该模型的子集。在 Open3D 中,可以通过 o3d.geometry.PointCloud.segment_plane 函数实现平面分割提取。文章来源:https://www.toymoban.com/news/detail-465380.html
plane_model, inliers = pcd.segment_plane(distance_threshold=0.1,
ransac_n=3,
num_iterations=100)
distance_threshold、ransac_n 和 num_iterations文章来源地址https://www.toymoban.com/news/detail-465380.html
到了这里,关于Open3D 实现建筑物点云立面和平面分割提取的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!