目录
源代码:
返回值
我使用的groundTruth图像:
预测图像
基于IOU的F1是评价模型实例分割能力的一种评价指标,该指标在2018年的Urban 3D Challenge和2020年的阿里天池建筑智能普查竞赛中作为评价标准。
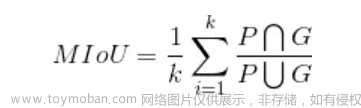
计算公式如下:

其余计算指标:
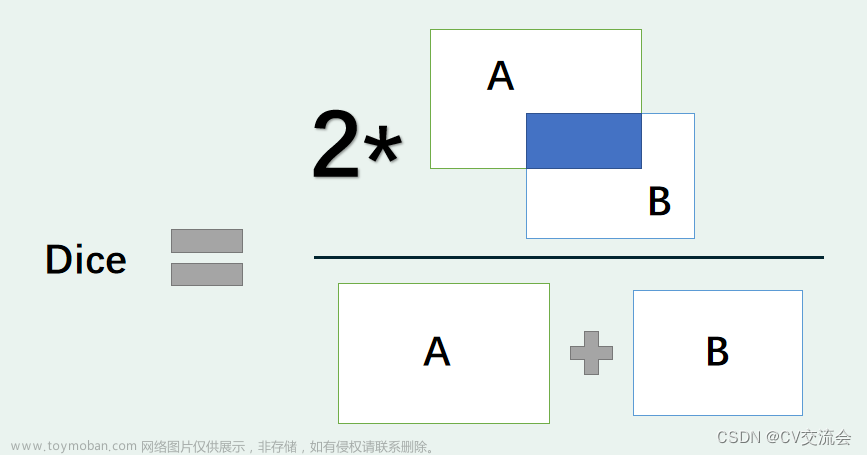
1、IoU: 交并比,两个区域重叠的部分除以两个区域的集合部分, IOU算出的值score > 0.5 就可以被认为一个不错的结果了
2、mIoU(mean IoU):均交并比,识别或者分割图像一般都有好几个类别,把每个分类得出的分数进行平均一下就可以得到mean IoU,也就是mIoU。
3、Precision:精确率,混淆矩阵计算得出,P = TP/(TP+FP)
4、Recall:召回率,R = TP/(TP+FN)
5、Accuracy:准确率,accuracy = (TP+TN)/(TP+TN+FP+FN)
即PA(Pixel Accuracy,像素精度?标记正确的像素占总像素的比例):表示检测物体的准确度,重点判断标准为是否检测到了物体
IoU只是用于评价一幅图的标准,如果我们要评价一套算法,并不能只从一张图片的标准中得出结论。一般对于一个数据集、或者一个模型来说。评价的标准通常来说遍历所有图像中各种类型、各种大小(size)还有标准中设定阈值.论文中得出的结论数据,就是从这些规则中得出的。
源代码:
from skimage import measure
from scipy import ndimage
import cv2 as cv
import numpy as np
def get_buildings(mask, pixel_threshold):
gt_labeled_array, gt_num = ndimage.label(mask)
unique, counts = np.unique(gt_labeled_array, return_counts=True)
for (k, v) in dict(zip(unique, counts)).items():
if v < pixel_threshold:
mask[gt_labeled_array == k] = 0
return measure.label(mask, return_num=True)
def calculate_f1_buildings_score(y_pred_path, iou_threshold=0.40, component_size_threshold=0):
#iou_threshold=0.40表示重合面积大于40%,判断为TP
tp = 0
fp = 0
fn = 0
# for m in tqdm(range(len(y_pred_list))):
processed_gt = set()
matched = set()
#mask_img是预测图像
# mask_img = cv.imread(r".\predictLabel\Halo-water.jpg", 0)
# mask_img = cv.imread(r".\predictLabel\Halo_image.png", 0)
mask_img = cv.imread(r".\predictLabel\RGB_image.png", 0)
#gt_mask_img 是groundTruth图像
gt_mask_img = cv.imread(r".\groundtruth\GT_image.png", 0)
predicted_labels, predicted_count = get_buildings(mask_img, component_size_threshold)
gt_labels, gt_count = get_buildings(gt_mask_img, component_size_threshold)
gt_buildings = [rp.coords for rp in measure.regionprops(gt_labels)]
pred_buildings = [rp.coords for rp in measure.regionprops(predicted_labels)]
gt_buildings = [to_point_set(b) for b in gt_buildings]
pred_buildings = [to_point_set(b) for b in pred_buildings]
for j in range(predicted_count):
match_found = False
for i in range(gt_count):
pred_ind = j + 1
gt_ind = i + 1
if match_found:
break
if gt_ind in processed_gt:
continue
pred_building = pred_buildings[j]
gt_building = gt_buildings[i]
intersection = len(pred_building.intersection(gt_building))
union = len(pred_building) + len(gt_building) - intersection
iou = intersection / union
if iou > iou_threshold:
processed_gt.add(gt_ind)
matched.add(pred_ind)
match_found = True
tp += 1
if not match_found:
fp += 1
fn += gt_count - len(processed_gt)
precision = tp / (tp + fp)
recall = tp / (tp + fn)
if precision == 0 or recall == 0:
return 0
f_score = 2 * precision * recall / (precision + recall)
return f_score , fp ,fn , tp ,precision , recall
def to_point_set(building):
return set([(row[0], row[1]) for row in building])
#y_pred_path 没用到,随便填
y_pred_path = 'predictLabel'
f_score = calculate_f1_buildings_score(y_pred_path, iou_threshold=0.5, component_size_threshold=1)
print(f_score)返回值

我使用的groundTruth图像:
 文章来源:https://www.toymoban.com/news/detail-466977.html
文章来源:https://www.toymoban.com/news/detail-466977.html
预测图像
 文章来源地址https://www.toymoban.com/news/detail-466977.html
文章来源地址https://www.toymoban.com/news/detail-466977.html
到了这里,关于实例分割计算指标TP,FP,FN,F1(附代码)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!