红叶何时落水
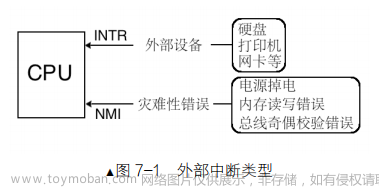
编号为 1-15 的对应系统异常,大于等于 16 的则全是外部中断。具体类型P108
这里的编号指的是中断源,而不是优先级,优先级是可以重定义的
在 NVIC 的中断控制及状态寄存器中,有一个 VECTACTIVE 位段;另外,还有一个特殊功能寄
存器 IPSR。在它们二者的里面,都记录了当前正服务的异常,给出了它的编号。
如果一个发生的异常不能被即刻响应,就称它被“悬起”(pending)。同系统里的挂起
优先级寄存器裁剪,保留高位,低位读回0, 以便于移植,防止优先级反转
应用程序中断及复位控制寄存器(AIRCR)(地址:0xE000_ED00)
31:16 VECTKEY 访问钥匙:任何对该寄存器的写操作,都必须同时把 0x05FA 写入此段,否则写操作被忽略。
10:8 PRIGROUP 优先级分组
2 SYSRESETREQ 请求芯片控制逻辑产生一次复位
0 VECTRESET 复位 CM3 处理器内核(调试逻辑除外),但是此复位不影响芯片上在内核以外的电路
相同的抢占优先级,不同的子优先级,不会发生抢占,只用于解除悬挂状态,当子优先级也一致时,判断中断源的编号
NVIC 中有一个寄存器,称为“向量表偏移量寄存器”(在地址 0xE000_ED08 处), 通过修改它的值就能重定位向量表
中断状态标志位在系统内部,用于标识运行,悬挂,完成状态,可以动态改变,可能会导致硬件层次的死循环
硬 fault 是上文讨论的总线 fault、存储器管理 fault 以及用法 fault 上访的结果。如果这些 fault 的服务例程无法执行,它们就会成为“硬伤”——上访(escalation)成硬 fault。
在 SVC 服务例程执行后,上次执行的 SVC 指令地址可以根据自动入栈的返回地址计算出。找到
了 SVC 指令后,就可以读取该 SVC 指令的机器码,从机器码中萃取出立即数,就获知了请求执行的
功能代号。如果用户程序使用的是 PSP,服务例程还需要先执行 MRS Rn, PSP 指令来获取应用程序的堆栈指针。通过分析 LR 的值,可以获知在 SVC 指令执行时,正在使用哪个堆栈
应用程序执行 SVC 时都是希望需的请求立即得到响应。另一方面,PendSV 则不同,它是可以像普通的中断一样被悬起的(不像SVC 那样会上访)。
OS 可以利用它“缓期执行”一个异常——直到其它重要的任务完成后才执行动作。
悬起 PendSV 的方法是:手工往 NVIC 的 PendSV 悬起寄存器中写 1。悬起后,如果优先级不够高,则将缓期等待执行
PendSV 的典型使用场合是在上下文切换时(在不同任务之间切换)p127
以前使用滴答定时器切换上下文,无法回到被他打断的中断中,可能会长时间的打断优先级低于它的中断,
为什莫呢???(使用双堆栈的条件下,线程模式响应中断时,进入中断入栈时使用psp,然后在中断中使用msp,结束该中断时,切换到psp来出栈)
任务一发生中断,中断放到任务一的堆栈中,然后滴答定时器中断,使用msp记录滴答定时器中断地址,
滴答定时器将psp切换到任务二的堆栈中,那么,滴答定时器在结束中断时,msp转化为任务二的PSP;
现在使用PendSV来切换上下文,(将PendSV的优先级设置为最低),滴答定时器打断中断后上下文未发生变化,因此可以回到被打断的中断
滴答定时器会悬起PendSV中断,当所有中断程序执行完毕后,让它来进行最低中断级别的上下文切换,回到任务中
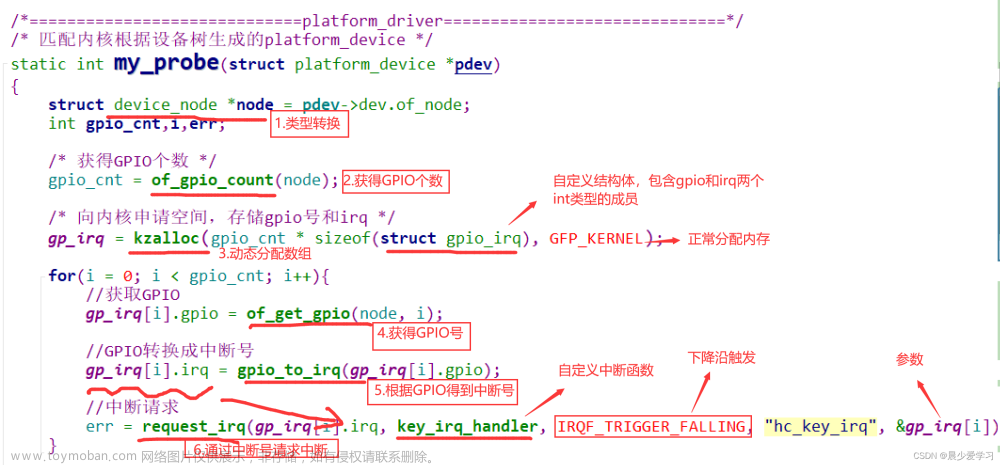
中断配置
每个外部中断源都在 NVIC 的下列寄存器中“挂号”,通过改变这些寄存器的值来改变中断状态
使能与除能寄存器
悬起与“解悬”寄存器
优先级寄存器
活动状态寄存器 大部分是只读的,由硬件自动操作,但是PendSV可以改变,以此来发出切换上下文的请求
1.中断的使能与除能分别使用各自的寄存器来控制 每个中断源只占了一个32位寄存器的一位,p130
写零无效 从而实现每个中断都可以自顾地设置,而互不侵犯——只需单一的写指令,不再需要读-改-写三步曲。
想使能,就写 1 到对应 SETENA 的位
欲除能一个中断,你需要写 1 到对应的 CLRENA 位
2. 悬起与“解悬”寄存器 同理
3.每个外部中断都有一个对应的优先级寄存器 每个寄存器占用 8 位 使用几位取决于芯片
中断的具体行为
响应异常的第一个行动,就是自动保存现场的必要部分:依次把xPSR, PC, LR, R12以及R3-R0由硬
件自动压入适当的堆栈中:如果当响应异常时,当前的代码正在使用PSP,则压入PSP,也就是使用
进程堆栈;否则就压入MSP,使用主堆栈。一旦进入了服务例程,就将一直使用主堆栈。
在执行服务例程时,将由MSP负责对堆栈的访问。
EXC_RETURN位段详解 p146
[31:4] EXC_RETURN的标识:必须全为1
3 0=返回后进入Handler模式
1=返回后进入线程模式
2 0=从主堆栈中做出栈操作,返回后使用MSP,
1=从进程堆栈中做出栈操作,返回后使用PSP
合法的EXC_RETURN值及其功能
0xFFFF_FFF1 返回handler模式
0xFFFF_FFF9 返回线程模式,并使用主堆栈(SP=MSP)
0xFFFF_FFFD 返回线程模式,并使用线程堆栈(SP=PSP)文章来源:https://www.toymoban.com/news/detail-467382.html
文章来源地址https://www.toymoban.com/news/detail-467382.html
到了这里,关于CM3学习-中断的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!





![猿创征文|[CM311-1A Armbian]-烧录制作 Armbian 系统盘以及写入 CM311-1A 机顶盒的 EMMC 刷成服务器](https://imgs.yssmx.com/Uploads/2024/02/442844-1.png)