一、获取图像——小孔成像实验

小孔成像实验中,点燃蜡烛,会在小孔另一面的白纸上看到一个倒立的烛焰。
此现象可以用来解释物理学原理:光在同种均匀介质中,在不受引力作用干扰的情况下沿直线传播。
这样,我们就用一种最简单的方法在白纸上获得了蜡烛烛焰的图像。
二、捕获图像——底片原理
如果将小孔成像实验中的白纸换为底片(胶片),就可以将蜡烛烛焰的图像记录下来。
胶片的全称为银盐感光胶片,也叫菲林,原理是将卤化银涂抹在乙酸片基上,当有光线照射到卤化银上时,卤化银转变为黑色的银,经显影工艺后固定于片基,成为我们常见到黑白负片,而彩色负片则是涂抹了三层卤化银以表现三原色。
这样一个最简单的照相机就诞生了。

三、聚焦成像——凸透镜的成像原理
小孔成像实验中,蜡烛自身是强光源,才能透过小孔在白纸上成像,所以该种方式对光源的要求极高,在日常生活中,我们不可能像蜡烛一样点亮自己,更多的是靠太阳光进行漫反射。
凸透镜可以改变光线折射率,对光线进行聚焦成像,凸透镜的成像原理如下:
1. 焦距
焦距是指平行光线通过镜头汇聚到一点,这一点到镜头中心的距离称为焦距,也就是上图中的F。
2. 凸透镜成像规律的应用
首先需要知道什么是物距?什么是相距?物距指的是上图中左边物体与镜头的距离,记作 u u u,相距指的是上图中右边成像与镜头的距离,记作 v v v。
(1)照相机
成像规律:当物体处于凸透镜的2倍焦距之外( u > 2 F u>2F u>2F),成倒立的、缩小的、实像,成像位于一倍焦距和二倍焦距之间( f < v < 2 F f<v<2F f<v<2F)
根据此成像规律,可以将凸透镜应用于照相机,拍摄2倍焦距之外的物体。
(2)投影仪
成像规律:当物体处于凸透镜的1倍焦距和2倍焦距之间( F < u < 2 F F<u<2F F<u<2F),成倒立的、放大的、实像,成像位于二倍焦距之外( v > 2 F v>2F v>2F)
根据此成像规律,可以将凸透镜应用于投影仪,放大在1倍焦距和2倍焦距之间的物体成像。
(3)放大镜
成像规律:当物体处于凸透镜的1倍焦距之内( u < F u<F u<F),成正立的、放大的、虚像,并且物体和成像在凸透镜的同一侧。
根据此成像规律,可以将凸透镜应用于放大镜,放大在1倍焦距之内的物体成像。
3. 焦距与视角的关系
视角的专业名词叫视场角(Field of view),简称FOV,指照相机最终能成像的角度范围。
视角与焦距之间的关系如下图:
图中
f
f
f是焦距,
h
h
h是感光元件的长度,可以近似得出焦距与FOV角度的关系:
F
O
V
=
2
a
r
c
t
a
n
(
h
2
f
)
FOV=2arctan(\dfrac{h}{2f})
FOV=2arctan(2fh)
得出结论:当f越小,FOV越大,即焦距越小,成像角度范围越大。
镜头的焦距和视角对应情况如下:
不同焦距的镜头拍摄出的实际成像区别如下:
一般情况下,相机镜头可以按视角分为
- 鱼眼镜头:焦距为16mm或更短,视角范围极广,接近180°
- 超广角镜头:24mm以下
- 广角镜头:24-35mm,视角范围广,景物个体小
- 标准镜头:35-85mm,视角接近于人类的视野
- 远摄镜头:85-300mm,视角范围窄,景物个体大
- 超远摄镜头:300mm以上
具体的相机镜头分类可以参考这篇文章:摄影入门之相机镜头的分类。
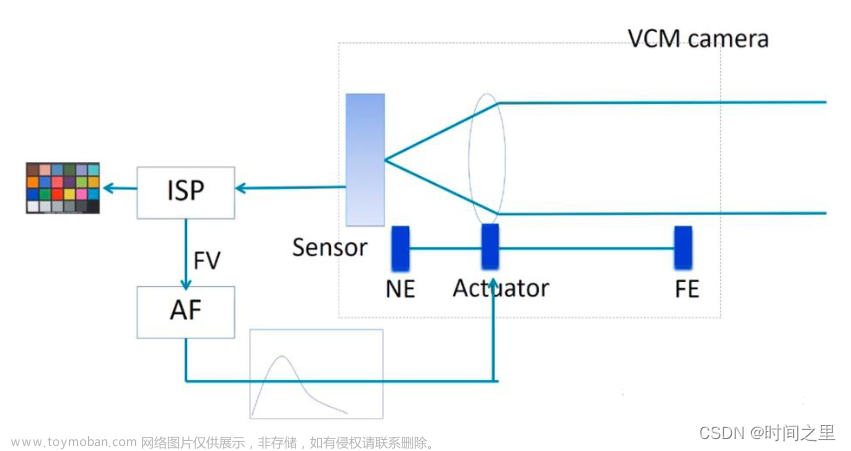
四、数字图像——感光元件(sensor)
胶片的原理是通过光产生化学反应来记录,而感光元件的原理将光转化为模拟电信号来记录,感光元件使得照相机从传统的胶片相机变为数码相机。
感光元件产生的模拟信号,首先经过模拟信号放大器进行信号放大,进而经过数模转换电路(DAC)变为数字图像,数字图像再经过ISP(Image Signal Processor)图像处理器进行数字图像处理,最后数字图像经过压缩编码算法,存储到SD卡中成为一个照片文件。
感光元件也叫图像传感器(sensor),分为两种:一种是广泛使用的CCD(电荷耦合)元件,另一种是CMOS(互补金属氧化物半导体)器件。
1. CCD
CCD全称Charge Coupled Device,它使用一种高感光度的半导体材料制成,由许多感光单位组成,通常以百万像素为单位。
当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,即把光转换为电荷,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。
2. CMOS
CMOS全称Complementary Metal-Oxide Semiconductor,它主要是利用硅和锗这两种元素所做成的半导体,使其在CMOS上共存着N极和P极的半导体,这两个互补效应所产生的电流即可被处理芯片记录为影像。
两者最主要的区别在于:CCD传感器的图像质量优于CMOS传感器,而CMOS传感器在成像速度、功耗、价格等方面优于CCD传感器。
关于CCD和CMOS的详细区别分析,参考文章:全面详细解析CMOS和CCD图像传感器。文章来源:https://www.toymoban.com/news/detail-467449.html
以上就是相机中最基本的原理,下篇文章将来介绍相机中常见的一些参数。文章来源地址https://www.toymoban.com/news/detail-467449.html
到了这里,关于摄影入门 | 相机的基本原理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!