源码地址见文末
1.项目与参数配置解读
首先,进入目录,使用pip install -r requirements.txt配置环境。
首先,对于demo的运行,首先需要准备好需要用于关键点匹配的数据,提供的代码中置于了image文件夹下,然后是训练的权重,代码中下载了室内场景和室外场景的训练权重。

配置参数指定:
--weight outdoor_ds.ckpt --save_video --input ./images/ --output_dir ./output/

2.Backbone特征提取
每次输入为两张图像,首先,使用卷积对两张图像进行特征提取。获得1/8和1/2尺度的粗粒度和细粒度特征图。源码中这部分使用的是resnet
class ResNetFPN_8_2(nn.Module):
"""
ResNet+FPN, output resolution are 1/8 and 1/2.
Each block has 2 layers.
"""
def __init__(self, config):
super().__init__()
# Config
block = BasicBlock
initial_dim = config['initial_dim']
block_dims = config['block_dims']
# Class Variable
self.in_planes = initial_dim
# Networks
self.conv1 = nn.Conv2d(1, initial_dim, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(initial_dim)
self.relu = nn.ReLU(inplace=True)
self.layer1 = self._make_layer(block, block_dims[0], stride=1) # 1/2
self.layer2 = self._make_layer(block, block_dims[1], stride=2) # 1/4
self.layer3 = self._make_layer(block, block_dims[2], stride=2) # 1/8
# 3. FPN upsample
self.layer3_outconv = conv1x1(block_dims[2], block_dims[2])
self.layer2_outconv = conv1x1(block_dims[1], block_dims[2])
self.layer2_outconv2 = nn.Sequential(
conv3x3(block_dims[2], block_dims[2]),
nn.BatchNorm2d(block_dims[2]),
nn.LeakyReLU(),
conv3x3(block_dims[2], block_dims[1]),
)
self.layer1_outconv = conv1x1(block_dims[0], block_dims[1])
self.layer1_outconv2 = nn.Sequential(
conv3x3(block_dims[1], block_dims[1]),
nn.BatchNorm2d(block_dims[1]),
nn.LeakyReLU(),
conv3x3(block_dims[1], block_dims[0]),
)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def _make_layer(self, block, dim, stride=1):
layer1 = block(self.in_planes, dim, stride=stride)
layer2 = block(dim, dim, stride=1)
layers = (layer1, layer2)
self.in_planes = dim
return nn.Sequential(*layers)
def forward(self, x):
# ResNet Backbone
x0 = self.relu(self.bn1(self.conv1(x)))
x1 = self.layer1(x0) # 1/2
x2 = self.layer2(x1) # 1/4
x3 = self.layer3(x2) # 1/8
# FPN
x3_out = self.layer3_outconv(x3)
x3_out_2x = F.interpolate(x3_out, scale_factor=2., mode='bilinear', align_corners=True)
x2_out = self.layer2_outconv(x2)
x2_out = self.layer2_outconv2(x2_out+x3_out_2x)
x2_out_2x = F.interpolate(x2_out, scale_factor=2., mode='bilinear', align_corners=True)
x1_out = self.layer1_outconv(x1)
x1_out = self.layer1_outconv2(x1_out+x2_out_2x)
return [x3_out, x1_out]3.注意力机制
在局部特征提取后,将1/8尺度的特征图加入正余弦位置编码通过LoFTR模块,提取与位置和上下文相关的局部特征。直观地说,LoFTR模块将特征转换为易于匹配的特征表示。
LoFTR包含一个自注意力机制和一个交叉注意力,自注意力机制作用于每张图像内部,交叉注意力机制作用于两张图片之间。
注意力机制这里使用的是线性注意力机制,即计算复杂度与图像序列线性相关。作者提出将原始的softmax(QK^T)使用核函数
 代替,其中
代替,其中 。然后,首先计算
。然后,首先计算 和V,计算后的矩阵维度为D*D,再与
和V,计算后的矩阵维度为D*D,再与 计算点积,计算规模为O(DND),由于D<<N,论文中说计算规模缩减为了O(N)。
计算点积,计算规模为O(DND),由于D<<N,论文中说计算规模缩减为了O(N)。
代码如下:
class LocalFeatureTransformer(nn.Module):
"""A Local Feature Transformer (LoFTR) module."""
def __init__(self, config):
super(LocalFeatureTransformer, self).__init__()
self.config = config
self.d_model = config['d_model']
self.nhead = config['nhead']
self.layer_names = config['layer_names']
encoder_layer = LoFTREncoderLayer(config['d_model'], config['nhead'], config['attention'])
self.layers = nn.ModuleList([copy.deepcopy(encoder_layer) for _ in range(len(self.layer_names))])
self._reset_parameters()
def _reset_parameters(self):
for p in self.parameters():
if p.dim() > 1:
nn.init.xavier_uniform_(p)
def forward(self, feat0, feat1, mask0=None, mask1=None):
"""
Args:
feat0 (torch.Tensor): [N, L, C]
feat1 (torch.Tensor): [N, S, C]
mask0 (torch.Tensor): [N, L] (optional)
mask1 (torch.Tensor): [N, S] (optional)
"""
assert self.d_model == feat0.size(2), "the feature number of src and transformer must be equal"
for layer, name in zip(self.layers, self.layer_names):
if name == 'self':
feat0 = layer(feat0, feat0, mask0, mask0)
feat1 = layer(feat1, feat1, mask1, mask1)
elif name == 'cross':
feat0 = layer(feat0, feat1, mask0, mask1)
feat1 = layer(feat1, feat0, mask1, mask0)
else:
raise KeyError
return feat0, feat14.粗粒度匹配过程
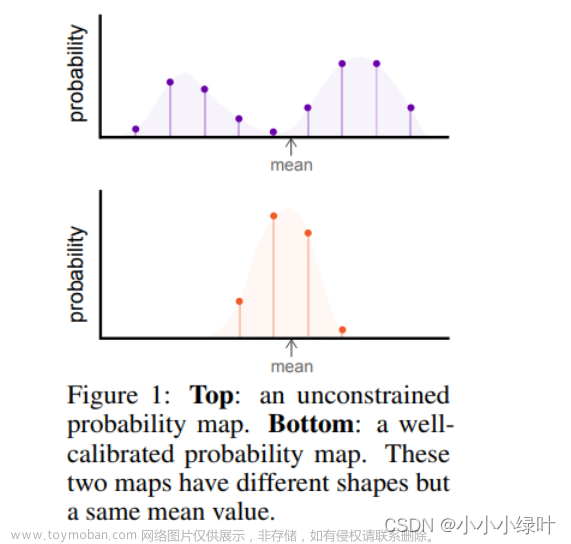
通过双softmax获得关键点之间的匹配概率,softmax是为了进行归一化,从而转化为概率。

在匹配过程中,首先通过阈值筛选,对结果进行过滤。然后使用互相最近邻,也就是说,如果说A图上的a点与B图的b点权重最大,如果两个点需要匹配上,也要求B图b点与A图a点的关系权重最大。然后,得到了两张图片粗粒度匹配的点的索引。
代码如下:
class CoarseMatching(nn.Module):
def __init__(self, config):
super().__init__()
self.config = config
# general config
self.thr = config['thr']
self.border_rm = config['border_rm']
# -- # for trainig fine-level LoFTR
self.train_coarse_percent = config['train_coarse_percent']
self.train_pad_num_gt_min = config['train_pad_num_gt_min']
# we provide 2 options for differentiable matching
self.match_type = config['match_type']
if self.match_type == 'dual_softmax':
self.temperature = config['dsmax_temperature']
elif self.match_type == 'sinkhorn':
try:
from .superglue import log_optimal_transport
except ImportError:
raise ImportError("download superglue.py first!")
self.log_optimal_transport = log_optimal_transport
self.bin_score = nn.Parameter(
torch.tensor(config['skh_init_bin_score'], requires_grad=True))
self.skh_iters = config['skh_iters']
self.skh_prefilter = config['skh_prefilter']
else:
raise NotImplementedError()
def forward(self, feat_c0, feat_c1, data, mask_c0=None, mask_c1=None):
"""
Args:
feat0 (torch.Tensor): [N, L, C]
feat1 (torch.Tensor): [N, S, C]
data (dict)
mask_c0 (torch.Tensor): [N, L] (optional)
mask_c1 (torch.Tensor): [N, S] (optional)
Update:
data (dict): {
'b_ids' (torch.Tensor): [M'],
'i_ids' (torch.Tensor): [M'],
'j_ids' (torch.Tensor): [M'],
'gt_mask' (torch.Tensor): [M'],
'mkpts0_c' (torch.Tensor): [M, 2],
'mkpts1_c' (torch.Tensor): [M, 2],
'mconf' (torch.Tensor): [M]}
NOTE: M' != M during training.
"""
N, L, S, C = feat_c0.size(0), feat_c0.size(1), feat_c1.size(1), feat_c0.size(2)
# normalize
feat_c0, feat_c1 = map(lambda feat: feat / feat.shape[-1]**.5,
[feat_c0, feat_c1])
if self.match_type == 'dual_softmax':
sim_matrix = torch.einsum("nlc,nsc->nls", feat_c0,
feat_c1) / self.temperature
if mask_c0 is not None:
sim_matrix.masked_fill_(
~(mask_c0[..., None] * mask_c1[:, None]).bool(),
-INF)
conf_matrix = F.softmax(sim_matrix, 1) * F.softmax(sim_matrix, 2)
elif self.match_type == 'sinkhorn':
# sinkhorn, dustbin included
sim_matrix = torch.einsum("nlc,nsc->nls", feat_c0, feat_c1)
if mask_c0 is not None:
sim_matrix[:, :L, :S].masked_fill_(
~(mask_c0[..., None] * mask_c1[:, None]).bool(),
-INF)
# build uniform prior & use sinkhorn
log_assign_matrix = self.log_optimal_transport(
sim_matrix, self.bin_score, self.skh_iters)
assign_matrix = log_assign_matrix.exp()
conf_matrix = assign_matrix[:, :-1, :-1]
# filter prediction with dustbin score (only in evaluation mode)
if not self.training and self.skh_prefilter:
filter0 = (assign_matrix.max(dim=2)[1] == S)[:, :-1] # [N, L]
filter1 = (assign_matrix.max(dim=1)[1] == L)[:, :-1] # [N, S]
conf_matrix[filter0[..., None].repeat(1, 1, S)] = 0
conf_matrix[filter1[:, None].repeat(1, L, 1)] = 0
if self.config['sparse_spvs']:
data.update({'conf_matrix_with_bin': assign_matrix.clone()})
data.update({'conf_matrix': conf_matrix})
# predict coarse matches from conf_matrix
data.update(**self.get_coarse_match(conf_matrix, data))
@torch.no_grad()
def get_coarse_match(self, conf_matrix, data):
"""
Args:
conf_matrix (torch.Tensor): [N, L, S]
data (dict): with keys ['hw0_i', 'hw1_i', 'hw0_c', 'hw1_c']
Returns:
coarse_matches (dict): {
'b_ids' (torch.Tensor): [M'],
'i_ids' (torch.Tensor): [M'],
'j_ids' (torch.Tensor): [M'],
'gt_mask' (torch.Tensor): [M'],
'm_bids' (torch.Tensor): [M],
'mkpts0_c' (torch.Tensor): [M, 2],
'mkpts1_c' (torch.Tensor): [M, 2],
'mconf' (torch.Tensor): [M]}
"""
axes_lengths = {
'h0c': data['hw0_c'][0],
'w0c': data['hw0_c'][1],
'h1c': data['hw1_c'][0],
'w1c': data['hw1_c'][1]
}
_device = conf_matrix.device
# 1. confidence thresholding 保留大于阈值的
mask = conf_matrix > self.thr
mask = rearrange(mask, 'b (h0c w0c) (h1c w1c) -> b h0c w0c h1c w1c',
**axes_lengths)
if 'mask0' not in data:
mask_border(mask, self.border_rm, False)
else:
mask_border_with_padding(mask, self.border_rm, False,
data['mask0'], data['mask1'])
mask = rearrange(mask, 'b h0c w0c h1c w1c -> b (h0c w0c) (h1c w1c)',
**axes_lengths)
# 2. mutual nearest
# 相互最近邻
mask = mask \
* (conf_matrix == conf_matrix.max(dim=2, keepdim=True)[0]) \
* (conf_matrix == conf_matrix.max(dim=1, keepdim=True)[0])
# 3. find all valid coarse matches
# this only works when at most one `True` in each row
mask_v, all_j_ids = mask.max(dim=2)
b_ids, i_ids = torch.where(mask_v)
j_ids = all_j_ids[b_ids, i_ids]
mconf = conf_matrix[b_ids, i_ids, j_ids]
# 4. Random sampling of training samples for fine-level LoFTR
# (optional) pad samples with gt coarse-level matches
if self.training:
# NOTE:
# The sampling is performed across all pairs in a batch without manually balancing
# #samples for fine-level increases w.r.t. batch_size
if 'mask0' not in data:
num_candidates_max = mask.size(0) * max(
mask.size(1), mask.size(2))
else:
num_candidates_max = compute_max_candidates(
data['mask0'], data['mask1'])
num_matches_train = int(num_candidates_max *
self.train_coarse_percent)
num_matches_pred = len(b_ids)
assert self.train_pad_num_gt_min < num_matches_train, "min-num-gt-pad should be less than num-train-matches"
# pred_indices is to select from prediction
if num_matches_pred <= num_matches_train - self.train_pad_num_gt_min:
pred_indices = torch.arange(num_matches_pred, device=_device)
else:
pred_indices = torch.randint(
num_matches_pred,
(num_matches_train - self.train_pad_num_gt_min, ),
device=_device)
# gt_pad_indices is to select from gt padding. e.g. max(3787-4800, 200)
gt_pad_indices = torch.randint(
len(data['spv_b_ids']),
(max(num_matches_train - num_matches_pred,
self.train_pad_num_gt_min), ),
device=_device)
mconf_gt = torch.zeros(len(data['spv_b_ids']), device=_device) # set conf of gt paddings to all zero
b_ids, i_ids, j_ids, mconf = map(
lambda x, y: torch.cat([x[pred_indices], y[gt_pad_indices]],
dim=0),
*zip([b_ids, data['spv_b_ids']], [i_ids, data['spv_i_ids']],
[j_ids, data['spv_j_ids']], [mconf, mconf_gt]))
# These matches select patches that feed into fine-level network
coarse_matches = {'b_ids': b_ids, 'i_ids': i_ids, 'j_ids': j_ids}
# 4. Update with matches in original image resolution
scale = data['hw0_i'][0] / data['hw0_c'][0]
scale0 = scale * data['scale0'][b_ids] if 'scale0' in data else scale
scale1 = scale * data['scale1'][b_ids] if 'scale1' in data else scale
mkpts0_c = torch.stack(
[i_ids % data['hw0_c'][1], i_ids // data['hw0_c'][1]],
dim=1) * scale0
mkpts1_c = torch.stack(
[j_ids % data['hw1_c'][1], j_ids // data['hw1_c'][1]],
dim=1) * scale1
# These matches is the current prediction (for visualization)
coarse_matches.update({
'gt_mask': mconf == 0,
'm_bids': b_ids[mconf != 0], # mconf == 0 => gt matches
'mkpts0_c': mkpts0_c[mconf != 0],
'mkpts1_c': mkpts1_c[mconf != 0],
'mconf': mconf[mconf != 0]
})
return coarse_matches5.细粒度匹配过程
对于细粒度特征图,首先对特征图有一个拆解过程,即对以5*5的大小将特征图拆解为4800个区域。得到4800*3200(4800是区域的个数,3200是特征的个数)3200表示,每个区域有5*5的像素点,通道数为128.以对应粗粒度的匹配结果。
之前经过粗粒度匹配,筛选出了匹配的区域,获得了匹配的索引。将索引与拆解的窗口进行对应,获得了粗粒度匹配的区域。每个匹配的区域有25个点,对每个点的特征经过自注意力和交叉注意力进行重构。
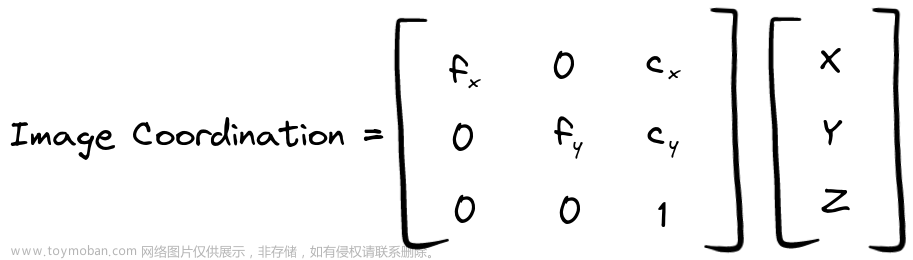
最后,找到区域的中间位置,使用点积得到每个点与中心点的关系向量。softmax归一化为热度图。整个区域热度图的期望即为匹配的点,再还原到原始的图像中。
细粒度特征图拆分代码:
class FinePreprocess(nn.Module):
def __init__(self, config):
super().__init__()
self.config = config
self.cat_c_feat = config['fine_concat_coarse_feat']
self.W = self.config['fine_window_size']
d_model_c = self.config['coarse']['d_model']
d_model_f = self.config['fine']['d_model']
self.d_model_f = d_model_f
if self.cat_c_feat:
self.down_proj = nn.Linear(d_model_c, d_model_f, bias=True)
self.merge_feat = nn.Linear(2*d_model_f, d_model_f, bias=True)
self._reset_parameters()
def _reset_parameters(self):
for p in self.parameters():
if p.dim() > 1:
nn.init.kaiming_normal_(p, mode="fan_out", nonlinearity="relu")
def forward(self, feat_f0, feat_f1, feat_c0, feat_c1, data):
W = self.W
stride = data['hw0_f'][0] // data['hw0_c'][0]
data.update({'W': W})
if data['b_ids'].shape[0] == 0:
feat0 = torch.empty(0, self.W**2, self.d_model_f, device=feat_f0.device)
feat1 = torch.empty(0, self.W**2, self.d_model_f, device=feat_f0.device)
return feat0, feat1
# 1. unfold(crop) all local windows
# 将特征图拆解为4800个长条,每个长条的窗口为5*5,以对应粗粒度的匹配。
feat_f0_unfold = F.unfold(feat_f0, kernel_size=(W, W), stride=stride, padding=W//2)
feat_f0_unfold = rearrange(feat_f0_unfold, 'n (c ww) l -> n l ww c', ww=W**2)
feat_f1_unfold = F.unfold(feat_f1, kernel_size=(W, W), stride=stride, padding=W//2)
feat_f1_unfold = rearrange(feat_f1_unfold, 'n (c ww) l -> n l ww c', ww=W**2)
# 2. select only the predicted matches
# 从粗粒度匹配得到的索引中,取出对应的窗口
feat_f0_unfold = feat_f0_unfold[data['b_ids'], data['i_ids']] # [n, ww, cf]
feat_f1_unfold = feat_f1_unfold[data['b_ids'], data['j_ids']]
# option: use coarse-level loftr feature as context: concat and linear
if self.cat_c_feat:
feat_c_win = self.down_proj(torch.cat([feat_c0[data['b_ids'], data['i_ids']],
feat_c1[data['b_ids'], data['j_ids']]], 0)) # [2n, c]
feat_cf_win = self.merge_feat(torch.cat([
torch.cat([feat_f0_unfold, feat_f1_unfold], 0), # [2n, ww, cf]
repeat(feat_c_win, 'n c -> n ww c', ww=W**2), # [2n, ww, cf]
], -1))
feat_f0_unfold, feat_f1_unfold = torch.chunk(feat_cf_win, 2, dim=0)
return feat_f0_unfold, feat_f1_unfold细粒度特征匹配代码:文章来源:https://www.toymoban.com/news/detail-467806.html
class FineMatching(nn.Module):
"""FineMatching with s2d paradigm"""
def __init__(self):
super().__init__()
def forward(self, feat_f0, feat_f1, data):
"""
Args:
feat0 (torch.Tensor): [M, WW, C]
feat1 (torch.Tensor): [M, WW, C]
data (dict)
Update:
data (dict):{
'expec_f' (torch.Tensor): [M, 3],
'mkpts0_f' (torch.Tensor): [M, 2],
'mkpts1_f' (torch.Tensor): [M, 2]}
"""
M, WW, C = feat_f0.shape
W = int(math.sqrt(WW))
scale = data['hw0_i'][0] / data['hw0_f'][0]
self.M, self.W, self.WW, self.C, self.scale = M, W, WW, C, scale
# corner case: if no coarse matches found
if M == 0:
assert self.training == False, "M is always >0, when training, see coarse_matching.py"
# logger.warning('No matches found in coarse-level.')
data.update({
'expec_f': torch.empty(0, 3, device=feat_f0.device),
'mkpts0_f': data['mkpts0_c'],
'mkpts1_f': data['mkpts1_c'],
})
return
# 找到区域的中间位置
feat_f0_picked = feat_f0_picked = feat_f0[:, WW//2, :]
# 使用点积得到每个点与中心点的关系向量
sim_matrix = torch.einsum('mc,mrc->mr', feat_f0_picked, feat_f1)
softmax_temp = 1. / C**.5
# softmax归一化为热度图
heatmap = torch.softmax(softmax_temp * sim_matrix, dim=1).view(-1, W, W)
# compute coordinates from heatmap
# 计算期望并还原到原始图像中
coords_normalized = dsnt.spatial_expectation2d(heatmap[None], True)[0] # [M, 2]
grid_normalized = create_meshgrid(W, W, True, heatmap.device).reshape(1, -1, 2) # [1, WW, 2]
# compute std over <x, y>
var = torch.sum(grid_normalized**2 * heatmap.view(-1, WW, 1), dim=1) - coords_normalized**2 # [M, 2]
std = torch.sum(torch.sqrt(torch.clamp(var, min=1e-10)), -1) # [M] clamp needed for numerical stability
# for fine-level supervision
data.update({'expec_f': torch.cat([coords_normalized, std.unsqueeze(1)], -1)})
# compute absolute kpt coords
self.get_fine_match(coords_normalized, data)
@torch.no_grad()
def get_fine_match(self, coords_normed, data):
W, WW, C, scale = self.W, self.WW, self.C, self.scale
# mkpts0_f and mkpts1_f
mkpts0_f = data['mkpts0_c']
scale1 = scale * data['scale1'][data['b_ids']] if 'scale0' in data else scale
mkpts1_f = data['mkpts1_c'] + (coords_normed * (W // 2) * scale1)[:len(data['mconf'])]
data.update({
"mkpts0_f": mkpts0_f,
"mkpts1_f": mkpts1_f
})链接:https://pan.baidu.com/s/1nWbz-dXyzO7dN8lrospMVw?pwd=8rgv
提取码:8rgv 文章来源地址https://www.toymoban.com/news/detail-467806.html
到了这里,关于关键点匹配——商汤LoFTR源码详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!