| 第2章 | 回到目录 | 后续暂时用不到 |
|---|

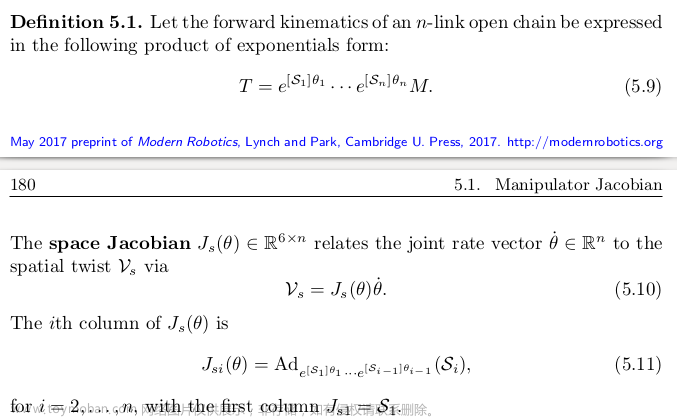
人体运动是神经系统控制 1000 多块肌肉有节律收缩,驱动 200 多块骨骼绕 100 多个关节协同运动的结果。人体运动信息是人体骨肌运动系统和神经控制系统等多方面综合运动功能的宏观反映,人体不同的运动功能障碍/疾病和康复水平在运动信息中都有所反映。所以,对人体运动的研究一直是机器人设计、智能控制、人机工程、虚拟仿真、康复工程、生物力学等多个学科领域研究的热点。
3.1 概论
人体运动测量技术是随着摄影技术的出现而兴起的。
今天的人体运动测量技术已完全建立在现代摄影技术、电子信息技术和计算机技术的基础上。
1. 基于影像的运动捕捉技术
二维运动影响分析通常是从一台高速摄像机所拍摄的图像上解析出研究对象人体关节点的二维坐标,由此计算出动作分析所需要的位移、速度、加速度、关节角度、角速度、角加速度及转动惯量、动能等有关运动参数。三维立体摄像图像分析是采用两台或多台摄像机从不同角度对同一研究对象进行同步拍摄,然后把所拍摄的平面影像数字化,通过合成获得所需的人体三维运动空间坐标。相比其他采集方式,此方法中运动图像的采集受外界条件制约小,对比赛现场的影响小,因此被体育科研工作者广泛采用。
利用平面图像进行三维重构的直接线性变换算法 (direct linear transformation, DLT) 是目前广泛采用的基本算法,由 Abdel 和 Krarara 于 1971 年提出,该方法因具有如下优点而得到了广泛应用:
- 各相机光轴不需相交;
- 相机位置可任意放置而不需测量;
- 只需两部相机即可获取三维坐标;
- 可使用更多的相机,从而使获取的三维坐标精度更高。
该算法的基本思想为:假设物方坐标 ( x , y , z x,y,z x,y,z) 与像坐标 ( u , v u,v u,v) 间映射关系为含若干待定系数的函数,根据一组已知的 ( x , y , z , u , v x,y,z,u,v x,y,z,u,v) 即可求解出映射函数中各待定系数,从而得到 ( x , y , z x,y,z x,y,z) 与 ( u , v u,v u,v) 的映射关系,该步骤即为标定。采用多部相机,分别标定得到各自的物像映射函数,根据物方点 ( x , y , z x,y,z x,y,z) 在各相机的像坐标 ( u , v u,v u,v) 及已标定出的物像映射函数即可联立解出物方坐标 ( x , y , z x,y,z x,y,z),从而实现重构。
目前,对影片和录像带上人体运动图像关节点的自动识别研究已取得了初步成功并用于实践,但这种依靠灰度识别的技术还只能在人体关节点上粘贴明显的标志物来实现,在关节被遮挡的情况下依然依靠人工判断关节点。显然,肉眼判断关节点是制约影响分析的瓶颈和迫切需要解决的问题。此外,标准人体模型并非完全适合各类体育项目,尤其是一些对体型有特殊要求的项目。
2 . 其他运动捕捉技术
随着计算机技术、电子技术、传感器技术等的飞速发展,新的运动测量技术不断涌现,如角度计、速度计、加速计等。
3.2 人体运动测量内容与设备
人体的运动除空间的三维位移以外,各关节还伴随着伸/屈、内旋/外旋、内收/外展三种旋转运动。人体运动参数是人体生物力学仿真分析的重要数据,其基本参数可通过测量获得。
3.2.1 人体运动测量内容
运动学参数包括时间参数、空间参数、时空参数。
1. 时间参数
描述运动何时发生、整个运动所消耗的时间或循环运动的周期。时间特征包括时刻和时间两个量。
2. 空间参数
描述人体运动中的空间位置及运动范围。空间参数包括质点坐标、轨迹、路程、位移和角位移等。
3. 时空参数
描述人体运动时空间位置变化与时间历程的关系,表现出人体运动中的时空特征。时空参数包括速度、加速度、角速度和角加速度等。
要完整描述人体某部位的运动,一般需要上述 18 个参数变量,它们可以通过直接或间接的方法测量或计算得到。
3.2.2 运动捕捉系统的主要类型与工作特性
运动捕捉又称动作捕捉,是记录运动的物体或人的过程。当它包含面部的细微表情时,通常被称为性能捕获。在许多领域,运动捕捉也被称为运动跟踪。文章来源:https://www.toymoban.com/news/detail-468006.html
1. 运动捕捉系统组成
2. 运动捕捉系统主要类型与工作特性
3.3 运动测量与仿真分析
运动测量是采用运动测量设备准确测量运动物体在三维空间运动状况,然后使用计算机对测量的数据进行处理,得到描述被测对象的运动参数。文章来源地址https://www.toymoban.com/news/detail-468006.html
3.3.1 运动测量与数据处理
3.3.2 人体骨肌系统运动仿真与可视化
3.3.3 人体骨肌系统运动学计算分析
3.3.4 人体运动学仿真分析软件
3.4 中国人体下肢典型行为运动测量与分析
3.4.1 中国人体下肢典型行为运动
3.4.2 测量设备与样本组织
3.4.3 步行、慢跑、上下楼梯、蹲与跪六项典型运动测量
3.4.4 盘腿坐
到了这里,关于【生物力学】《人体骨肌系统生物力学》- 王成焘老师 - 第3章 - 人体运动测量与仿真分析的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!