一、SDK安装
首先介绍什么是SDK:
sdk接口全称是Software Development Kit,指的是软件开发工具包,一般都是软件工程师为特定的软件包、软件框架、硬件平台、操作系统等建立应用软件时的开发工具的集合。也就是官方为了让用户购买自己的硬件之后定制的一系列使用教程,其中包括许多工具,一般都是一些软件工程师为特定的软件包、软件框架、硬件平台、操作系统等建立应用软件时的开发工具的集合。
软件开发工具包括广义上指辅助开发某一类软件的相关文档、范例和工具的集合。软件开发工具包是一些被软件工程师用于为特定的软件包、软件框架、硬件平台、操作系统等创建应用软件的开发工具的集合,一般而言SDK即开发 Windows 平台下的应用程序所使用的 SDK。
请参考官方官方教程。
1、安装平台介绍
jetson NX 边缘计算平台、ubuntu 18.04 系统
如果有其他平台的安装官网也提供了安装教程,请按照实际平台进行安装
2、安装步骤
直接从官网教程的第四步开始,前面的部分看不懂可以不管
2.1 注册服务器的公钥
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
注意该步骤不能开代理,不然会失败。如果还是失败,官网也给出了解决方案,执行以下命令
export http_proxy="http://<proxy>:<port>"
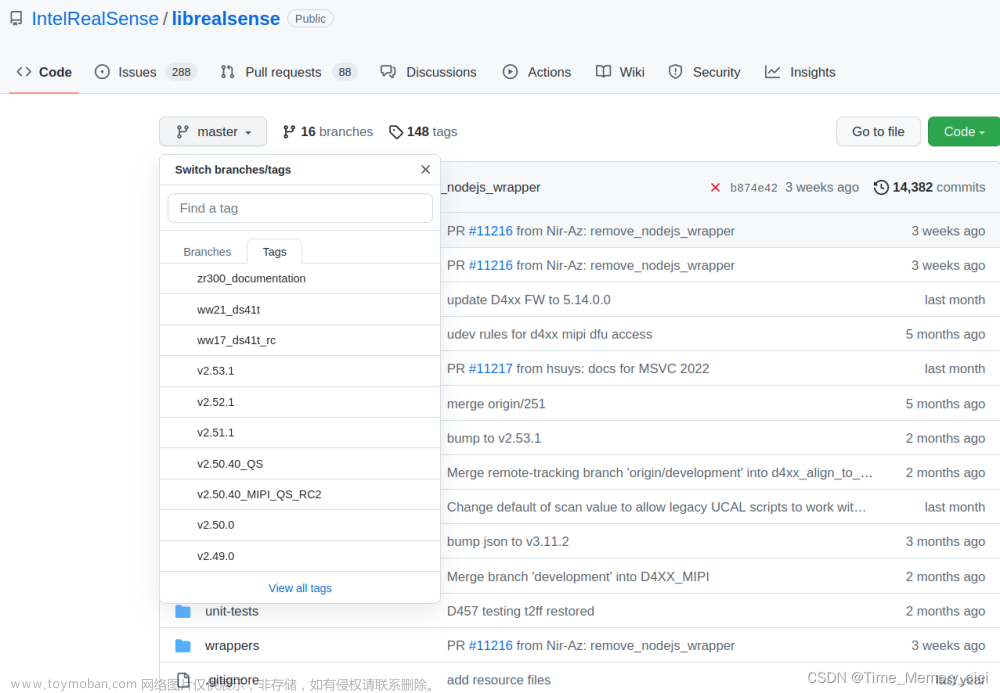
2.2 将服务器添加到存储库列表:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo bionic main" -u
2.3安装开发工具包:
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
2.4安装完成,验证安装效果:
执行以下命令:
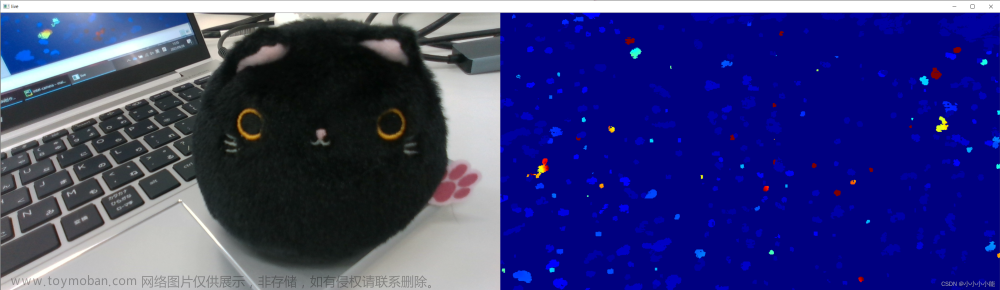
realsense-viewer
就能得到显示界面,左上角可以切换2D/3D效果,也可以选择需要的图像形式。点击开关按钮即可切换
二、ROS安装
ROS为了能够使传感器数据便于通信,也集成了相机的安装包,直接下载使用即可。可以参考下面这位博主的教程,比较详细,但还是有几个问题需要解决:
参考连接:这个博客写得可以
1、opencv路径找到不的问题
由于自己手动安装了opencv,与ROS melodic自带的opencv版本不一致,导致编译源码时报错。显示 cv_briage 的安装包找不到,报错
解决办法:找到opt/ros/melodic/share/cv_bridge/cv_Config.cmake文件,查看100多行里边的set opencv包含路劲的opencv名字和自己的安装名字是否一致,不是就更改opencv的名字,一般安装的目录在/usr/include/opencv里,我的是opencv4.所以将cv_Config.cmake文件下的opencv名字改为opencv4文章来源:https://www.toymoban.com/news/detail-468405.html
2、Eigien编译器版本太低的问题
由于自己安装了eigien库,导致版本太高,需要c++14编译器,因此将
realsense2_camera下的cmakelists文件中的–std=c++11 改为c++14即可。文章来源地址https://www.toymoban.com/news/detail-468405.html
3、最后编译完成,可运行查看
到了这里,关于jetson NX 下部署Intel RealSense d455相机——SDK安装+ROS安装的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!