前言
由于现阶段终端开发十分迅速,高通平台的GPS链路十分简单,在第一次贴片开机之后,等待软件驱动给SDR以及SDR的GPS接收端口配好之后,再把链路上 LNA的GPIO以及VDD电源配齐之后,即可开始调试GPS通路的性能。
因此本文将针对高通平台的GPS研发阶段工程测试进行讲解,并且对测试过程中出现的几个常见参数进行一个数学解释,以便更好理解整个GPS测试过程的意义:)
一、GPS工程测试
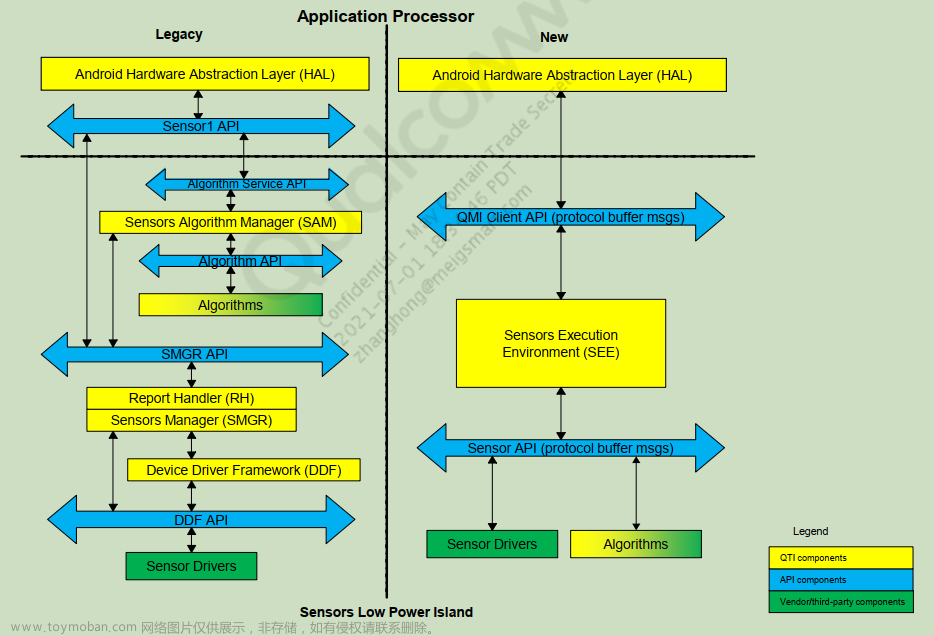
一般来说,高通平台的GNSS测试包括FTM测试和并发测试(Concurrency Test),其中的并发测试特指GNSS与所有制式的并发共存性能测试,若更进一步的细致测试,还有与摄像头、OLED屏幕等外设的共存性能测试。
测试系列也迭代到了第九代(Gen 9),我们常用FTM测试树来验证硬件并且测试GPS性能(GNSS_Gen9_FTM.xtt)
该测试树包括以下的测试项:宽带、窄带的频谱分析(WB、NB Spectrum Analysis),CN0的校准测试,追踪灵敏度测试(Tracking Sensitivity),误码率测试(BER)。而在进行这些测试前,还需要确认几个前提:测试环境以及仪器的搭建,板子/整机的状态。
1、测试环境&仪器搭建
测试环境应位于实验室,有条件可以在屏蔽房内进行,避免外界信号干扰影响测试结果,特别是在测试灵敏度与BER的时候,应确保测试环境内有没有或者已经关闭GPS放大器;仪器应具备:带有QDART工具的PC,CMW500作为时钟参考以及基站设备,信号发生器(SG)作为加扰信号,GNSS模拟器作为卫星信号模拟发射,其中,PC与CMW、SG、GNSS应通过GPIB相连形成控制,而CMW的clock输出应该与SG、GNSS的clock输入相连形成同步,最后PC与主板/整机通过USB连接形成执行与写入。
2、板子/整机状态
测试前先确认
- 软件与硬件状态,是否软件与有源器件的驱动与端口配置OK?硬件上的供电电压是否正常?
- XO是否已经进行校准?可通过NV67300查看,其中的“ft_qual_ind”字段为1,则是未进行XO校准的板子,需进行校准;若该字段为5,则说明板子已经进行了XO校准,但是,由于新平台的XO校准只对占空比(Duty Cycle CAL)和频偏进行粗校准(DC Coarse CAL),没有微调或者细校准(Fine CAL)节点,因此,微调XO这一部分交给了仪器或者现网,需通过信令连接仪器后,以最大功率发射维持几分钟,后查看NV是否变化,或者连接现网,打开板子/整机的GPS,将其置于室内GPS放大器下,维持几分钟后查看NV是否变化;若该字段为6/8/11,则说明XO已经微调,可以进入测试状态。亦可手动更改该字段,目前手动更改该NV项,并没有影响整个测试过程~
可以参考以下的checklist:
| 检查项 | 检查标准 | √/× |
|---|---|---|
| 校准测试软件 | QDART和xtt是否与平台一致且为最新版本? | |
| PC的控制 | GPIB是否与所有仪器连接并且有COM口? | |
| 仪器的同步 | 同步信号是否与所有仪器连接并且不报错? | |
| 主板的连接 | PC与主板是否成功启动并且有端口? | |
| 软件确认 | 是否合入了最新变更并且能驱动GPS? | |
| 硬件确认 | 驱动GPS时的GPIO和VDD是否正常? | |
| XO校准 | XO是否经过校准并且NV67300为6/8/11? | |
| 干扰确认 | 环境是否无GPS干扰?是否有屏蔽盖? | |
| GPS确认 | GPS是否能在QXDM上打开并且搜到星? | |
| 插损确认 | 系统链路损耗SPL是否在接受范围之内? | |
| CN值确认 | CN值是否≥40dB? | |
| 灵敏度确认 | 灵敏度是否在理论值附近? |
二、GPS接收机参数解析
1、灵敏度
对于GPS系统,灵敏度指标包括多场景下的指标——跟踪灵敏度、冷启动灵敏度、热启动灵敏度。GPS接收机首先需要完成对卫星信号的捕捉,完成捕捉所需要的最低信号强度为捕捉灵敏度,在捕捉之后能够维持卫星信号跟踪所需要的最低信号强度为跟踪灵敏度(Tracking Sensitivity),目前业界已经可以实现跟踪灵敏度在 -160dBm以下。
从系统观点看,GPS接收机的灵敏度主要由两个方面决定:
- 接收机前端整个信号通路的增益以及噪声性能
- 基带部分的算法性能
其中接收机前端决定了接收信号到达基带部分时的信噪比,而基带算法则决定了解调、捕捉、跟踪过程所能够容忍的最小信噪比。
2、空间衰减
GPS信号是从距离地面20000km的低轨道卫星上发送到地面上来的,其中L1频段(f=1575.42MHz)的自由空间衰减为:
λ
=
c
f
=
3
∗
1
0
8
m
/
s
1575.42
M
H
z
=
0.19
m
\lambda = \frac{c}{f}= \frac{3*10^8m/s}{1575.42MHz}=0.19m
λ=fc=1575.42MHz3∗108m/s=0.19m
F
=
(
λ
4
π
R
)
2
=
(
0.19
4
∗
π
∗
2
∗
1
0
7
)
2
=
5.73
∗
1
0
−
19
=
182.4
d
B
F=(\frac{\lambda}{4\pi R})^2=(\frac{0.19}{4*\pi *2*10^7})^2=5.73*10^{-19}=182.4dB
F=(4πRλ)2=(4∗π∗2∗1070.19)2=5.73∗10−19=182.4dB
根据GPS系统设计指标,L1频段的C/A码信号的发射EIRP应达到P=26.8dBW,减去衰减值后,再加上5dB余量,则得到卫星信号到达地面的数值为:
P
=
26.8
−
182.4
−
5
≈
−
160
d
B
W
=
−
130
d
B
m
P=26.8-182.4-5≈-160dBW=-130dBm
P=26.8−182.4−5≈−160dBW=−130dBm
因此,在测试中会定义GPS信号到达天线端口的信号功率为-130dBm。
我们知道环境热噪声功率谱密度为-174dBm/Hz,因此对带宽为2.046MHz的GPS信号,其频带噪声能量达到了
−
174
d
B
m
/
H
z
+
10
l
o
g
(
2.046
M
H
z
)
=
−
111
d
B
m
-174dBm/Hz+10log(2.046MHz)=-111dBm
−174dBm/Hz+10log(2.046MHz)=−111dBm
远大于-130dBm的GPS信号,因此GPS是隐藏在噪声之下的。
3、SNR信噪比
是基带中有用信号与噪声功率之比,这个有用信号是指调制前,或者解调后的信号
S
N
R
=
10
∗
l
o
g
10
(
S
N
)
SNR=10*log_{10}(\frac{S}{N})
SNR=10∗log10(NS)
4、C/N载噪比
是指解调前的射频信号载波功率与噪声功率的比值,SNR与CNR对比,前者是反应基带信号质量,后者是反应射频信号质量,一般来说CNR往往大于SNR,因为信号在解调过程中会额外引入噪声,恶化信噪比SNR。
5、C/N0载波噪声密度(Carrier to Noise Density)
环境热噪声功率谱密度为-174dBm/Hz=-204dBW/Hz,GPS信号功率为-130dBm=-160dBW,可以得到:
C
N
0
=
−
160
d
B
W
−
204
d
B
W
/
H
z
=
−
130
d
B
m
−
174
d
B
m
/
H
z
=
44
d
B
∗
H
z
\frac{C}{N_0}=\frac{-160dBW}{-204dBW/Hz}=\frac{-130dBm}{-174dBm/Hz}=44dB*Hz
N0C=−204dBW/Hz−160dBW=−174dBm/Hz−130dBm=44dB∗Hz
所以CN0的单位为dB*Hz,不同于SNR、CNR的单位为dB。在GPS系统中,常用CN0来表示信号强度与质量,其原因是除了GPS L1之外,还有GPS L2、L5等频段,以及其他的定位系统如BeiDou、Galileo、GLONASS等,每个系统都会有自己的频率、带宽、信号调制的配置,而SNR或者CNR会因为带宽不同,引入的总噪声能量不同,导致最终的计算结果不同,因此无法统一量化。而C/N0则是将带宽变化这一因素消除,直接量化信号质量的同时,不会随带宽的变化而改变。
C
N
=
10
l
o
g
C
−
10
l
o
g
N
=
10
l
o
g
C
−
10
l
o
g
(
N
0
∗
B
W
)
=
10
l
o
g
C
−
10
l
o
g
N
0
−
10
l
o
g
B
W
\frac{C}{N}=10logC-10logN=10logC-10log(N_0*BW)=10logC-10logN_0-10logBW
NC=10logC−10logN=10logC−10log(N0∗BW)=10logC−10logN0−10logBW
C
N
0
=
10
l
o
g
C
−
10
l
o
g
N
0
=
10
l
o
g
C
−
10
l
o
g
N
0
−
10
l
o
g
B
W
+
10
l
o
g
B
W
=
C
N
+
10
l
o
g
B
W
\frac{C}{N_0}=10logC-10logN_0=10logC-10logN_0-10logBW+10logBW=\frac{C}{N}+10logBW
N0C=10logC−10logN0=10logC−10logN0−10logBW+10logBW=NC+10logBW
由以上公式推导可得:
C
N
=
−
160
d
B
W
2.046
M
H
z
∗
−
204
d
B
W
/
H
z
=
−
160
d
B
W
−
141
d
B
W
=
−
19
d
B
\frac{C}{N}=\frac{-160dBW}{2.046MHz*-204dBW/Hz}=\frac{-160dBW}{-141dBW}=-19dB
NC=2.046MHz∗−204dBW/Hz−160dBW=−141dBW−160dBW=−19dB
C
N
0
=
C
N
+
10
l
o
g
B
W
=
−
19
d
B
+
10
l
o
g
(
2.046
M
H
z
)
=
44
d
B
∗
H
z
\frac{C}{N_0}=\frac{C}{N}+10logBW=-19dB+10log(2.046MHz)=44dB*Hz
N0C=NC+10logBW=−19dB+10log(2.046MHz)=44dB∗Hz
由此,我们在进行测试时,总是要求搜星时的CN值至少要大于40dB,这就是整个测试参数的由来
三、GPS测试示例
1、电路元件确认
这里形容一下我们的方案链路:GPS信号被天线接收后,经过一个三合一的滤波器Z1(GPS L1+WiFi 2.4G+WiFi 5G)将L1频段的信号滤出,再经过一个GPS频段的滤波器Z11,GPS LNA D61,最后再经过GPS频段滤波器Z10后,才进入SDR的GNSS L1 port
其中我们关注的就是上面链路器件的参数,特别是滤波器的插入损耗(Insertion Loss)以及LNA的噪声系数(Noise Figure),查看datasheet,参数如下:
| 器件&位号 | supplier | 参数 |
|---|---|---|
| 滤波器Z1 | Murata | IL,617~1605MHz,0.85dB typ. |
| 滤波器Z11,Z10 | Murata/Taiyo | IL,1558~1605.886MHz,1.4dB typ. |
| LNA D61 | MXD | NF,0.50dB @ 1575.42MHz |
得到链路上的损耗大致为:0.8+1.4+0.5+1.4=4.1dB
实际上报的System Processing Loss为2.8dB
2、测试环境搭建

- 带有QDART工具的PC
- CMW500输出时钟参考
- 信号发生器(SG)作为加扰信号
- GNSS模拟器作为卫星信号模拟发射
其中,PC与CMW、SG、GNSS应通过GPIB相连形成控制,而CMW的clock输出应该与SG、GNSS的clock输入相连形成同步,最后PC与主板/整机通过USB连接形成执行与写入
设置参数: - GNSS信号模拟器,信号强度=-130dBm
- 信号发生器,加扰信号强度=-120dBm(经过10dB衰减)
3、测试结果
- 宽带频谱分析

- 窄带频谱分析

- CN0

- 追踪灵敏度
 文章来源:https://www.toymoban.com/news/detail-468907.html
文章来源:https://www.toymoban.com/news/detail-468907.html
- BER
 文章来源地址https://www.toymoban.com/news/detail-468907.html
文章来源地址https://www.toymoban.com/news/detail-468907.html
到了这里,关于高通平台GPS工程测试&接收参数解析的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!