1. 内参与畸变
理论部分可以参考其他博客或者视觉slam十四讲
相机标定主要是为了获得相机的内参矩阵K和畸变参数
内参矩阵K
畸变系数:径向畸变(k1,k2,k3), 切向畸变(p1,p2) 径向畸变公式
径向畸变公式 切向畸变公式
切向畸变公式 张正友标定方法能够提供一个比较好的初始解,用于后序的最优化.
张正友标定方法能够提供一个比较好的初始解,用于后序的最优化.
这里用棋盘格进行标定,如果能够处理圆的偏心误差问题,用圆形图案标定板可能效果更好.
至少三张图片,一般用10-20张图片为最佳,要保证相机视野内各个角度,各个位置,各个方向都有图像.尽量多角度多位置.
最好用买的标定板,效果好,平.最好是背光板,能够保证足够的亮度和均匀度.文章来源:https://www.toymoban.com/news/detail-468988.html
2. 用OpenCV标定相机程序
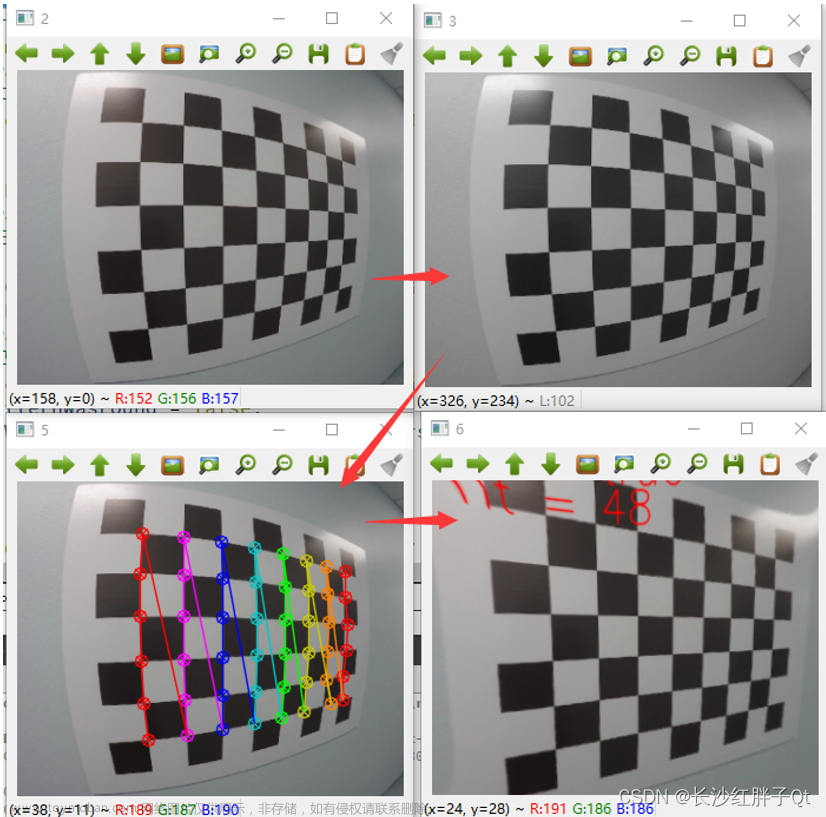
1,提取角点
2,亚像素角点
3,可视化提取角点(非必须)
4,标定
5,误差计算(重投影误差)文章来源地址https://www.toymoban.com/news/detail-468988.html
#include <iostream>
#include <fstream>
#include <string>
#include <opencv2/opencv.hpp>
using namespace std;
int main(int argc, char **argv)
{
string dir = "/home/wfq/MyProjects/cal_images/"; //标定图片所在文件夹
ifstream fin(dir + "file_images.txt"); //读取标定图片的路径,与cpp程序在同一路径下
if (!fin) //检测是否读取到文件
{
cerr << "没有找到文件" << endl;
return -1;
}
ofstream fout(dir + "calibration_result.txt"); //输出结果保存在此文本文件下
//依次读取每一幅图片,从中提取角点
cout << "开始提取角点……" << endl;
int image_nums = 0; //图片数量
cv::Size image_size; //图片尺寸
int points_per_row = 10; //每行的内点数
int points_per_col = 7; //每列的内点数
cv::Size corner_size = cv::Size(points_per_row, points_per_col); //标定板每行每列角点个数,共10*7个角点
vector<cv::Point2f> points_per_image; //缓存每幅图检测到的角点
vector<vector<cv::Point2f>> points_all_images; //用一个二维数组保存检测到的所有角点
string image_file_name; //声明一个文件名的字符串
while (getline(fin, image_file_name)) //逐行读取,将行读入字符串
{
image_nums++;
//读入图片
cv::Mat image_raw = cv::imread(dir + image_file_name);
if (image_nums == 1)
{
// cout<<"channels = "<<image_raw.channels()<<endl;
// cout<<image_raw.type()<<endl; //CV_8UC3
image_size.width = image_raw.cols; //图像的宽对应着列数
image_size.height = image_raw.rows; //图像的高对应着行数
cout << "image_size.width = " << image_size.width << endl;
cout << "image_size.height = " << image_size.height << endl;
}
//角点检测
cv::Mat image_gray; //存储灰度图的矩阵
cv::cvtColor(image_raw, image_gray, CV_BGR2GRAY); //将BGR图转化为灰度图
// cout<<"image_gray.type() = "<<image_gray.type()<<endl; //CV_8UC1
//step1 提取角点
bool success = cv::findChessboardCorners(image_gray, corner_size, points_per_image);
if (!success)
{
cout << "can not find the corners " << endl;
exit(1);
}
else
{
//亚像素精确化(两种方法)
//step2 亚像素角点
cv::find4QuadCornerSubpix(image_gray, points_per_image, cv::Size(5, 5));
// cornerSubPix(image_gray,points_per_image,Size(5,5));
points_all_images.push_back(points_per_image); //保存亚像素角点
//在图中画出角点位置
//step3 角点可视化
cv::drawChessboardCorners(image_raw, corner_size, points_per_image, success); //将角点连线
cv::imshow("Camera calibration", image_raw);
cv::waitKey(0); //等待按键输入
}
}
cv::destroyAllWindows();
//输出图像数目
int image_sum_nums = points_all_images.size();
cout << "image_sum_nums = " << image_sum_nums << endl;
//开始相机标定
cv::Size block_size(21, 21); //每个小方格实际大小, 只会影响最后求解的平移向量t
cv::Mat camera_K(3, 3, CV_32FC1, cv::Scalar::all(0)); //内参矩阵3*3
cv::Mat distCoeffs(1, 5, CV_32FC1, cv::Scalar::all(0)); //畸变矩阵1*5
vector<cv::Mat> rotationMat; //旋转矩阵
vector<cv::Mat> translationMat; //平移矩阵
//初始化角点三维坐标,从左到右,从上到下!!!
vector<cv::Point3f> points3D_per_image;
for (int i = 0; i < corner_size.height; i++)
{
for (int j = 0; j < corner_size.width; j++)
{
points3D_per_image.push_back(cv::Point3f(block_size.width * j, block_size.height * i, 0));
}
}
vector<vector<cv::Point3f>> points3D_all_images(image_nums,points3D_per_image); //保存所有图像角点的三维坐标, z=0
int point_counts = corner_size.area(); //每张图片上角点个数
//!标定
/**
* points3D_all_images: 真实三维坐标
* points_all_images: 提取的角点
* image_size: 图像尺寸
* camera_K : 内参矩阵K
* distCoeffs: 畸变参数
* rotationMat: 每个图片的旋转向量
* translationMat: 每个图片的平移向量
* */
//step4 标定
cv::calibrateCamera(points3D_all_images, points_all_images, image_size, camera_K, distCoeffs, rotationMat, translationMat, 0);
//step5 对标定结果进行评价
double total_err = 0.0; //所有图像平均误差总和
double err = 0.0; //每幅图像的平均误差
vector<cv::Point2f> points_reproject; //重投影点
cout << "\n\t每幅图像的标定误差:\n";
fout << "每幅图像的标定误差:\n";
for (int i = 0; i < image_nums; i++)
{
vector<cv::Point3f> points3D_per_image = points3D_all_images[i];
//通过之前标定得到的相机内外参,对三维点进行重投影
cv::projectPoints(points3D_per_image, rotationMat[i], translationMat[i], camera_K, distCoeffs, points_reproject);
//计算两者之间的误差
vector<cv::Point2f> detect_points = points_all_images[i]; //提取到的图像角点
cv::Mat detect_points_Mat = cv::Mat(1, detect_points.size(), CV_32FC2); //变为1*70的矩阵,2通道保存提取角点的像素坐标
cv::Mat points_reproject_Mat = cv::Mat(1, points_reproject.size(), CV_32FC2); //2通道保存投影角点的像素坐标
for (int j = 0; j < detect_points.size(); j++)
{
detect_points_Mat.at<cv::Vec2f>(0, j) = cv::Vec2f(detect_points[j].x, detect_points[j].y);
points_reproject_Mat.at<cv::Vec2f>(0, j) = cv::Vec2f(points_reproject[j].x, points_reproject[j].y);
}
err = cv::norm(points_reproject_Mat, detect_points_Mat, cv::NormTypes::NORM_L2);
total_err += err /= point_counts;
cout << "第" << i + 1 << "幅图像的平均误差为: " << err << "像素" << endl;
fout << "第" << i + 1 << "幅图像的平均误差为: " << err << "像素" << endl;
}
cout << "总体平均误差为: " << total_err / image_nums << "像素" << endl;
fout << "总体平均误差为: " << total_err / image_nums << "像素" << endl;
cout << "评价完成!" << endl;
//将标定结果写入txt文件
cv::Mat rotate_Mat = cv::Mat(3, 3, CV_32FC1, cv::Scalar::all(0)); //保存旋转矩阵
cout << "\n相机内参数矩阵:" << endl;
cout << camera_K << endl<< endl;
fout << "\n相机内参数矩阵:" << endl;
fout << camera_K << endl<< endl;
cout << "畸变系数:\n";
cout << distCoeffs << endl<< endl<< endl;
fout << "畸变系数:\n";
fout << distCoeffs << endl<< endl<< endl;
for (int i = 0; i < image_nums; i++)
{
cv::Rodrigues(rotationMat[i], rotate_Mat); //将旋转向量通过罗德里格斯公式转换为旋转矩阵
fout << "第" << i + 1 << "幅图像的旋转矩阵为:" << endl;
fout << rotate_Mat << endl;
fout << "第" << i + 1 << "幅图像的平移向量为:" << endl;
fout << translationMat[i] << endl
<< endl;
}
fout << endl;
fout.close();
return 0;
}
3.画棋盘标定板
//函数声明,默认每行11个block, 没列8个block, block大小为75个像素. 也就是10*7个内点
void drawChessBoard(int blocks_per_row=11, int blocks_per_col=8, int block_size = 75);
// 11 8 75
void drawChessBoard(int blocks_per_row, int blocks_per_col, int block_size)
{
//blocks_per_row=11 //每行11个格子,也就是10个点
//blocks_per_col=8 //每列8个格子,也就是7个点
//block_size=75 //每个格子的像素大小
cv::Size board_size = cv::Size(block_size * blocks_per_row, block_size * blocks_per_col);
cv::Mat chessboard = cv::Mat(board_size, CV_8UC1);
unsigned char color = 0;
for (int i = 0; i < blocks_per_row; i++)
{
color = ~color;
for (int j = 0; j < blocks_per_col; j++)
{
chessboard(cv::Rect(i * block_size, j * block_size, block_size, block_size)).setTo(color);
color = ~color;
}
}
cv::Mat chess_board = cv::Mat(board_size.height + 100, board_size.width + 100, CV_8UC1, cv::Scalar::all(256)); //上下左右留出50个像素空白
chessboard.copyTo(chess_board.rowRange(50, 50 + board_size.height).colRange(50, 50 + board_size.width));
cv::imshow("chess_board", chess_board);
cv::imwrite("chess_board.png", chess_board);
cv::waitKey(-1);
cv::destroyAllWindows();
}
4.OpenCV拍照
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
int main(int argc, char **argv)
{
cv::namedWindow("Camera",cv::WINDOW_AUTOSIZE);
cv::VideoCapture cap;
cap.open(0);
if(!cap.isOpened())
{
cout<<"camera open failed!\n";
return -1;
}
cv::Mat image;
int id=1;
char symbol;
while(id<=6)
{
cap>>image;
if(image.empty())
break;
cout<<"y or n"<<endl;
cin>>symbol;
if(symbol=='y')
{
cv::imwrite(to_string(id)+".png",image);
cout<<"第"<<id<<"张图片"<<endl;
id++;
}
}
return 0;
}
到了这里,关于用OpenCV进行相机标定(张正友标定,有代码)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!