SSD简介
SSD,全称Single Shot MultiBox Detector,是Wei Liu在ECCV 2016上提出的一种目标检测算法,截至目前是主要的检测框架之一,相比Faster RCNN有明显的速度优势,相比YOLO又有明显的mAP优势,是在 RCNN 系列和 YOLO 系列之外属于单阶段的另外一系列的奠基之作。
论文链接:https://arxiv.org/pdf/1512.02325.pdf
官方代码:https://github.com/weiliu89/caffe/tree/ssd
SSD的主要设计理念:根据不同的特征层设置不同大小的先验框,在不同的特征层上建立检测头和分类头,以满足大、小目标检测的需求。关于SSD的具体的技术细节,网上大神给出的解释很多,这里不再赘述。
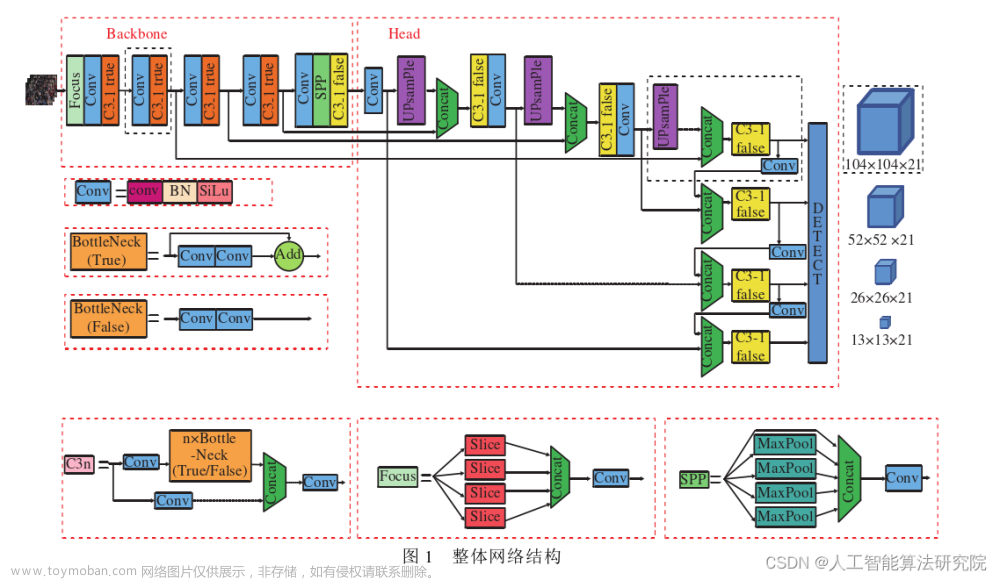
网络架构如下:
本文主要是使用 pytorch 对 SSD 进行简单的实现。包括各个模块的讲解、数据的前、后处理、训练参数解释等。
网络搭建
论文中以 VGG16 为主干网络,替换了 VGG16 5_3 层和后面的部分,换成了 3*3 的卷积,再加上多尺度特征层,来实现多个检测和分类头。
卷积块
论文中以 卷积 + 激活函数为一个卷积标准模块,这里实现的时候加上了 BatchNorm,具体实现如下:
def conv_blk(in_channels, out_channels, stride=1, padding=1):
"""卷积块"""
return nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride,padding=padding),
nn.BatchNorm2d(out_channels),
nn.ReLU())
下采样块
论文中以 池化层作为下采样层,来实现特征层的大小减半,这里实现的时候,将 卷积 + 池化层作为一个标准下采样模块,具体实现如下:
def down_sample_blk(in_channels, out_channels, ceil_mode = False):
"""下采样块"""
return nn.Sequential(conv_blk(in_channels, out_channels),
nn.MaxPool2d(2, ceil_mode=ceil_mode))
主干网
使用上面两个模块,按照 VGG16 网络的基本架构实现 主干网:具体实现代码如下:
def backbone(input_shape):
"""搭建vgg16主干网络"""
return nn.Sequential(
conv_blk(input_shape[0], 64),
down_sample_blk(64, 64),
conv_blk(64, 128),
down_sample_blk(128, 128),
conv_blk(128, 256),
conv_blk(256, 256),
down_sample_blk(256, 512, ceil_mode=True),
conv_blk(512, 512),
conv_blk(512, 512),
conv_blk(512, 512) # vgg16 4-3层
)
多层特征提起层
主干网仅仅到 vgg16 4-3层, 后面的我们需要加上特征提取层,来实现输出不同特征层的需求,具体实现代码如下:
class extra_feature(nn.Module):
"""根据backbone输出的特征图,生成额外的特征图"""
def __init__(self, input_shape) -> None:
super().__init__()
# (3, 300, 300) -> (512, 38, 38)
self.out_layer1 = backbone(input_shape)
# (512, 38, 38) -> (512, 19, 19)
self.out_layer2 = nn.Sequential(
nn.MaxPool2d(2, stride=1, padding=1),
conv_blk(512, 512),
conv_blk(512, 512),
down_sample_blk(512, 521),
conv_blk(521, 1024),
conv_blk(1024, 1024)
)
# (512, 19, 19) -> (256, 10, 10)
self.out_layer3 = nn.Sequential(
conv_blk(1024, 256),
conv_blk(256, 512, stride=2)
)
# (256, 10, 10) -> (256, 5, 5)
self.out_layer4 = nn.Sequential(
conv_blk(512, 128),
conv_blk(128, 256, stride=2)
)
# (256, 5, 5) -> (256, 3, 3)
self.out_layer5 = nn.Sequential(
conv_blk(256, 128),
conv_blk(128, 256, stride=2)
)
# (256, 3, 3) -> (256, 1, 1)
self.out_layer6 = nn.Sequential(
conv_blk(256, 128),
nn.Conv2d(128, 256, kernel_size=3, stride=1, padding=0)
)
def forward(self, x):
out1 = self.out_layer1(x)
out2 = self.out_layer2(out1)
out3 = self.out_layer3(out2)
out4 = self.out_layer4(out3)
out5 = self.out_layer5(out4)
out6 = self.out_layer6(out5)
return out1, out2, out3, out4, out5, out6
经过 extra_feature 层,我们将会得到六层特征层的输出,对应上面图片的六层输出层,特征层的大小依次为:(38, 38)、(19, 19)、(10, 10)、(5, 5)、(3, 3)、(1, 1)。
输出头
得到六个输出层之后,我们需要对六层输出的通道数目进行调整,使其为我们需要分类的数目和需要输出的检测框的数目的大小。具体代码如下:
def mutiboxhead(num_classes):
"""搭建SSD多尺度检测头"""
num_anchors = [4, 6, 6, 6, 4, 4] # 每个尺度的锚框数量
num_channels = [512, 1024, 512, 256, 256, 256] # 每个尺度的通道数量
cls_predictors = [] # 类别预测器
bbox_predictors = [] # 边界框预测器
for i in range(6):
cls_predictors.append(nn.Conv2d(num_channels[i], num_anchors[i] * (num_classes + 1), kernel_size=3, padding=1))
bbox_predictors.append(nn.Conv2d(num_channels[i], num_anchors[i] * 4, kernel_size=3, padding=1))
cls_predictors = nn.ModuleList(cls_predictors)
bbox_predictors = nn.ModuleList(bbox_predictors)
return cls_predictors, bbox_predictors
根据上面构建的所有东西来实现我们的SSD网络,实现代码如下:
class SSD(nn.Module):
def __init__(self, input_shape=(3, 300, 300), num_classes=20, **kwargs):
super(SSD, self).__init__(**kwargs)
self.num_classes = num_classes
self.input_shape = input_shape
self.extra_feature = extra_feature(input_shape)
self.cls_predictors, self.bbox_predictors = mutiboxhead(num_classes)
def forward(self, x):
x = self.extra_feature(x)
cls_preds = []
bbox_preds = []
for i, feature in enumerate(x):
cls_preds.append(self.cls_predictors[i](feature).permute(0, 2, 3, 1)) # (batch_size, num_classes, h, w) -> (batch_size, h, w, num_classes)
bbox_preds.append(self.bbox_predictors[i](feature).permute(0, 2, 3, 1)) # (batch_size, 4, h, w) -> (batch_size, h, w, 4)
bbox_preds = torch.cat([pred.reshape(pred.shape[0], -1, 4) for pred in bbox_preds], dim=1) # (batch_size, num_anchors, 4)
cls_preds = torch.cat([pred.reshape(pred.shape[0], -1, self.num_classes + 1) for pred in cls_preds], dim=1) # (batch_size, num_anchors, num_classes + 1)
return bbox_preds, cls_preds # (batch_size, num_anchors, 4), (batch_size, num_anchors, num_classes + 1)
如果对搭建的网络参数或者输出的形状不是很放心的话,可以输出和跟踪一下看看具体的网络的架构。
if __name__ == "__main__":
x = torch.randn(1, 3, 300, 300)
ssd = SSD((3, 300, 300), 20)
cls_preds, bbox_preds = ssd(x)
print(cls_preds[0].shape, bbox_preds[0].shape)
数据处理
一般情况下,我们使用 COCO 或者 VOC 数据集进行训练,这里以 VOC 数据进行讲解,如何加载数据。
形成训练TXT
VOC 的标签为 XML 文件,在网络加载数据的时候,不是很方便,这里将其处理为 TXT 文件,方便我们读取。处理的结果如下:
每一行分别为:图片的路径,x_min y_min x_max y_max label … x_min y_min x_max y_max label
在后面加载数据的时候,直接读取即可,稍微方便一点。
处理的代码如下;
# 从 voc 数据集中读取数据,并生成可用于训练、验证和测试txt文件
import os
try:
import xml.etree.cElementTree as ET
except ImportError:
import xml.etree.ElementTree as ET
def get_class_names(class_names_path):
"""
获取数据集的类别名字
Args:
class_names_path (str): 数据集路径
Returns:
class_names (list): 类别名字列表
"""
with open(class_names_path, "r") as f:
class_names = f.readlines()
class_names = {c.strip(): i for i, c in enumerate(class_names)}
return class_names, len(class_names)
def write_txt(txt_path, JPEGImages_path, annotation_path, txt_f, name_dict):
"""
将txt文件写入到txt_path
Args:
txt_path (str): txt文件保存路径
txt_f (list): txt文件内容
"""
with open(txt_path, "r") as f:
img_name_lists = f.readlines()
train_name_lists = [img_name.strip() for img_name in img_name_lists]
for train_name in train_name_lists:
txt_f.write(os.path.join(JPEGImages_path, train_name + ".jpg").replace('\\', '/'))
xml_name = train_name + ".xml"
xml_path = os.path.join(annotation_path, xml_name)
tree = ET.parse(xml_path)
root = tree.getroot()
for obj in root.iter("object"):
cls = name_dict[obj.find("name").text]
xmlbox = obj.find("bndbox")
xmin = xmlbox.find("xmin").text
ymin = xmlbox.find("ymin").text
xmax = xmlbox.find("xmax").text
ymax = xmlbox.find("ymax").text
txt_f.write(f",{xmin} {ymin} {xmax} {ymax} {cls}")
txt_f.write("\n")
def convert_annotation_2_txt(dataset_path, txt_path):
"""
将voc数据集的xml标注转换为txt格式
Args:
dataset_path (str): 数据集路径
txt_path (str): txt文件保存路径
"""
annotation_path = os.path.join(dataset_path, "Annotations")
ImageSets_path = os.path.join(dataset_path, "ImageSets/Main")
JPEGImages_path = os.path.join(dataset_path, "JPEGImages")
train_txt_f = open(os.path.join(txt_path, "train.txt"), "w")
val_txt_f = open(os.path.join(txt_path, "val.txt"), "w")
test_txt_f = open(os.path.join(txt_path, "test.txt"), "w")
name_dict, _ = get_class_names(os.path.join(txt_path, "voc_classes.txt"))
write_txt(os.path.join(ImageSets_path, "train.txt"), JPEGImages_path, annotation_path, train_txt_f, name_dict)
train_txt_f.close()
write_txt(os.path.join(ImageSets_path, "val.txt"), JPEGImages_path, annotation_path, val_txt_f, name_dict)
val_txt_f.close()
write_txt(os.path.join(ImageSets_path, "test.txt"), JPEGImages_path, annotation_path, test_txt_f, name_dict)
test_txt_f.close()
if __name__ == "__main__":
convert_annotation_2_txt("你的\VOC07+12", "输出txt想要保存的地点")
运行完以上程序,会形成 train.txt, test.txt val.txt,分别对应训练集、验证集和测试集。训练的时候读取对应的txt即可。
Dataset
获得完上面的 txt, 我们就可以编写自己的 Dataset 函数,形成自己在网络训练时候的数据加载方式。具体代码如下:
# 加载数据集的函数
class SSDDataset(Dataset):
"""
定义自己的数据集加载方式
"""
def __init__(self, data_lines, transform=None):
"""
初始化文件路径和数据增强所需的信息
Args:
data (list): 文件路径列表
transform: torchvision.transforms
"""
self.data_lines = data_lines
self.transform = transform
def __len__(self):
"""
返回数据集的总长度
Returns:
length (int): 数据集的总长度
"""
return len(self.data_lines)
def __getitem__(self, index):
"""
通过索引返回一个数据
Args:
index (int): 索引
Returns:
img (Tensor): 图像数据
label (Tensor): 标签数据
"""
data_line = self.data_lines[index].split(",")
image = np.array((Image.open(data_line[0]).convert("RGB")))
bboxes = np.array([list(map(int, box.split(' '))) for box in data_line[1:]])
if self.transform is not None:
augmentations = self.transform(image=image, bboxes=bboxes)
image = augmentations["image"]
bboxes = augmentations["bboxes"]
return image, bboxes
也就是通过输入的 index,来获取 图片 和对应的 标签信息, transform 是是否采用数据增强,数据增强的具体代码如下:
train_transforms = A.Compose(
[
# 保持图片的比例进行图片的放大
A.LongestMaxSize(max_size=300),
# 不保证图片比例进行放大,需要的时候会对图片添加 0
A.PadIfNeeded(
min_height=300, min_width=300, border_mode=cv2.BORDER_CONSTANT
),
# 进行正则化
A.Normalize(mean=[0.4914, 0.4822, 0.4465], std=[0.2023, 0.1994, 0.2010], max_pixel_value=255,),
# 转变为 tensor
ToTensorV2(),
],
# 对检测框进行调整
bbox_params=A.BboxParams(format="pascal_voc", label_fields=[],check_each_transform=False),
)
val_transforms = A.Compose(
[
# 保持图片的比例进行图片的放大
A.LongestMaxSize(max_size=300),
# 不保证图片比例进行放大,需要的时候会对图片添加 0
A.PadIfNeeded(
min_height=300, min_width=300, border_mode=cv2.BORDER_CONSTANT
),
# 进行正则化
A.Normalize(mean=[0.4914, 0.4822, 0.4465], std=[0.2023, 0.1994, 0.2010], max_pixel_value=255,),
# 转变为 tensor
ToTensorV2(),
],
# 对检测框进行调整
bbox_params=A.BboxParams(format="pascal_voc", label_fields=[], check_each_transform=False),
)
因为我们使用的格式为 pascal_voc 的格式,所以这里的我们选择的增强方式为 pascal_voc,如果使用的为 coco 的话,换成 coco 即可。
一般情况下,在训练的时候和在验证的时候采用的数据增强手段是不一样的,训练的时候,我们强调数据的多样性,会使用较多的数据增强的手段,为反转、随机剪裁、色域变换等,但是在验证的时候,我们强调当前网络的性能,一般采取较少的数据增强手段。
注意:我们在对图片进行数据增强的时候,要保证检测的一致性。
DataLoader
刚刚只是定义了如何获取图片,但是如何设置为可以供 pytorch 使用,需要放到 DataLoader 中, 形成迭代器,来实现不间断的拿取 batch_size 的图片。
具体代码如下:
def load_data(root_path, batch_size=8, num_workers=0):
# 第一步:加载数据集
with open(os.path.join(root_path, "train.txt"), "r") as f:
train_lines = f.readlines()
with open(os.path.join(root_path, "train.txt"), "r") as f:
val_lines = f.readlines()
train_dataset = SSDDataset(train_lines, train_transforms)
val_dataset = SSDDataset(val_lines, val_transforms)
train_iter = DataLoader(train_dataset, batch_size=batch_size, shuffle=True, num_workers=num_workers, collate_fn=collate_fn)
test_iter = DataLoader(val_dataset, batch_size=batch_size, shuffle=True, num_workers=num_workers, collate_fn=collate_fn)
return train_iter, test_iter
def collate_fn(batch):
"""
自定义一个函数,将一个batch的数据拼接起来
Args:
batch (list): batch数据
Returns:
images (Tensor): 图像数据
bboxes (list): 边界框数据
"""
images = []
bboxes = []
for image, bbox in batch:
images.append(image)
bboxes.append(torch.tensor(bbox))
return torch.stack(images, dim=0), bboxes
Anchors
生成先验框
SSD 网络需要生成在不同的特征层生成先验框,以满足对不同大、小物体检测的需求;具体实现代码如下:
# SSD 生成 anchors 的方式, 中心宽高的方式
def generate_anchors(feature_maps_size=[38, 19, 10, 5, 3, 1], image_size=300, steps=[8, 16, 32, 64, 100, 300],
min_sizes=[30, 60, 111, 162, 213, 264], max_sizes=[60, 111, 162, 213, 264, 315],
aspect_ratios=[[2], [2, 3], [2, 3], [2, 3], [2], [2]], clip=True):
mean = []
for k, f in enumerate(feature_maps_size): #[38, 19, 10, 5, 3, 1],
for i, j in product(range(f), repeat=2):
f_k = image_size / steps[k]
# unit center x,y
cx = (j + 0.5) / f_k
cy = (i + 0.5) / f_k
# aspect_ratio: 1
# rel size: min_size
s_k = min_sizes[k] / image_size
mean += [cx, cy, s_k, s_k]
# aspect_ratio: 1
# rel size: sqrt(s_k * s_(k+1))
s_k_prime = sqrt(s_k * (max_sizes[k]/image_size))
mean += [cx, cy, s_k_prime, s_k_prime]
# rest of aspect ratios
for ar in aspect_ratios[k]:
mean += [cx, cy, s_k*sqrt(ar), s_k/sqrt(ar)]
mean += [cx, cy, s_k/sqrt(ar), s_k*sqrt(ar)]
# back to torch land
prior_anchors = torch.Tensor(mean).view(-1, 4) # * image_size ##[8732,4]
# 对于超出边界的先验框进行裁剪到边界内
if clip:
prior_anchors.clamp_(max=1, min=0)
# 返回的时候转化为 corner 的数据格式,并且乘上 图片 对应的尺度获取真实大小
return box_center_to_corner(prior_anchors) * image_size
匹配先验框
在训练的时候,我们需要将真实的标签框和先验框进行匹配,来获取训练的正样本。也就是先确保每个标签框有一个先验框负责预测,完成 一对一 的匹配。如果其他的先验框没有被分配,且和其中某个标签框的 iou 也很大,也将对列为正样本,完成 先验框 -> 标签框 的 多对一 的匹配。具体技术细节,请参考:沐神的动手学深度学习的 13.4. 锚框 的章节。
具体实现代码如下:
def assign_anchor_to_bbox(ground_truth, anchors, device, iou_threshold=0.5):
""" 为锚框分配边界框
Args:
ground_truth (Tensor): 边界框,形状为 (n, 4)
anchors (Tensor): 锚框,形状为 (k, 4)
device (torch.device): 用于分配张量的设备
iou_threshold (float): 阈值
Returns:
Tensor: 所分配的边界框,形状为 (k, 4)
"""
num_anchors, num_gt_boxes = anchors.shape[0], ground_truth.shape[0]
# 计算锚框和边界框的交并比
anchors_boxes_iou = box_iou(anchors, ground_truth)
# 为每个锚框分配边界框的索引, 形状为 (k, ), 默认为 -1
anchor_to_bbox_map = torch.full((num_anchors,), -1, dtype=torch.long, device=device)
# 找到每个 anchors 对应的最大 iou 值和索引
max_ious, indices = torch.max(anchors_boxes_iou, dim=1)
# 将交并比大于阈值的锚框分配给边界框
anchor_to_bbox_map[max_ious >= iou_threshold] = indices[max_ious >= iou_threshold]
# 找到应该丢弃的行和列,也就是找到每一个 gt 真实值匹配的 anchor 所以对应的行和列
col_discard = torch.full((num_anchors, ), -1)
row_discard = torch.full((num_gt_boxes,), -1)
# 每个 iou 较大的 anchor只保留一个gt对应
for _ in range(num_gt_boxes):
# 找到目前 iou 最大的位置,因为没有指定维度的话,默认将所有维度参与
# anchors_boxes_iou 的维度为 : [num_anchors, num_gt_boxes]
max_idx = torch.argmax(anchors_boxes_iou)
# 找到对应的列
box_idx = (max_idx % num_gt_boxes).long()
# 找到对应的行
anc_idx = (max_idx / num_gt_boxes).long()
# 将对应的 gt 作为 anchor 的真值
anchor_to_bbox_map[anc_idx] = box_idx
# 取出对应的行和列
anchors_boxes_iou[:, box_idx] = col_discard
anchors_boxes_iou[anc_idx, :] = row_discard
return anchor_to_bbox_map
位置 offset
网络并不是直接预测标签的中心点和宽高,那样会增加网络预测的难度,我们预测的时候,先验框相对于标签框的偏移量,包括中心点的偏移量和宽高的偏移量。参考 沐神动手学深度的讲解如下;
具体代码如下:
def offset_boxes(c_anc, assigned_bbox, eps=1e-6):
"""根据所分配的边界框来调整锚框
Args:
c_anc (Tensor): 锚框,形状为 (n, 4) center 形状
assigned_bbox (Tensor): 所分配的边界框,形状为 (n, 4) corner 形状
eps (float): 一个极小值,防止被零整除
Returns:
Tensor: 调整后的锚框,形状为 (n, 4)
"""
c_anc = box_corner_to_center(c_anc)
c_assigned_bbox = box_corner_to_center(assigned_bbox)
offset_xy = 10.0 * (c_assigned_bbox[:, :2] - c_anc[:, :2]) / (c_anc[:, 2:] + eps)
offset_wh = 5.0 * torch.log((c_assigned_bbox[:, 2:] + eps) / (c_anc[:, 2:] + eps))
offset = torch.cat([offset_xy, offset_wh], axis=1)
return offset
这些偏移量将作为训练的时候,真正的标签。
损失函数
有了网络的输出和真正的偏移量的标签,我们就可以定义我们的损失函数了。
关于 SSD 损失讲解,可以参考大神的解释:链接
简单来说,分为两个部分:
前面是置信度损失函数,后面是位置损失函数,中间为权重因子。再详细划分如下:

根据上面公式,定义损失函数如下:
def loc_loss(self, loc_preds, bbox_labels, bbox_masks):
"""计算位置损失
Args:
loc_preds (Tensor): 预测的位置结果,形状为 (batch_size, num_anchors, 4)
bbox_labels (Tensor): 真实的位置标签,形状为 (batch_size, num_anchors, 4)
bbox_masks (Tensor): 真实的位置标签的掩码,形状为 (batch_size, num_anchors, 4)
Returns:
Tensor: 位置损失
"""
# 第一步:计算损失
return F.l1_loss(loc_preds * bbox_masks, bbox_labels * bbox_masks, reduction='sum')
def conf_loss(self, conf_preds, cls_labels):
"""计算分类损失
Args:
conf_preds (Tensor): 预测的分类结果,形状为 (batch_size, num_anchors, num_classes)
cls_labels (Tensor): 真实的分类标签,形状为 (batch_size, num_anchors, 1)
Returns:
Tensor: 分类损失
"""
# 第一步:计算正样本的损失
# 获取正样本的索引
pos_mask = cls_labels > 1
# 获取正样本的数量
num_pos = pos_mask.long().sum(dim=1, keepdim=True) # (batch_size, 1)
# 计算正样本的损失, 交叉熵损失函数的输入为 (N, C) 和 (N, ),其中 N 为样本数量,C 为类别数量,会自动找到(N, C)中的对应的值,计算损失
pos_loss = F.cross_entropy( conf_preds.reshape(-1, conf_preds.shape[-1])[pos_mask.reshape(-1)], cls_labels[pos_mask])
# 第二步:计算负样本的损失
# 获取负样本的索引
neg_mask = cls_labels == 0
# 计算负样本的损失
neg_loss = F.cross_entropy(conf_preds.reshape(-1, conf_preds.shape[-1])[neg_mask.reshape(-1)], cls_labels[neg_mask])
# 第三步:计算损失
loss = pos_loss + neg_loss
# 返回损失
return loss
根据上面的损失函数,可以定义我们训练的总的损失函数类:具体代码如下:
class MultiBoxLoss():
"""根据预测的结果计算损失函数"""
def __init__(self, num_classes, device, alpha=1) -> None:
super().__init__()
self.num_classes = num_classes
self.image_size = 300
self.prior_anchors = generate_anchors()
self.device = device
self.alpha = alpha
def __call__(self, net_output, labels):
"""计算损失函数
Args:
net_output (tuple): 网络输出,包含回归预测和分类预测,
形状为 loc_preds:(batch_size, num_anchors, 4), conf_preds: (batch_size, num_anchors, 21)
labels (Tensor): 标签,形状为 (n, 5),其中 n 是所有边界框的数量, 5 表示 (类别, x, y, w, h)
Returns:
Tensor: 损失值
"""
# 第一步:获取网络输出 (batch_size, num_anchors, 4), (batch_size, num_anchors, 21)
loc_preds, conf_preds = net_output
batch_size, device = len(labels), loc_preds.device
num_anchors = self.prior_anchors.shape[0] # self.prior_anchors (num_anchors, 4)
# 第二步:为不同大小的特征层生成对应的 anchors 找到对应 target 标号, 并且将其转换为相对于 anchor 的偏移量
bbox_labels, bbox_masks, cls_labels = multibox_target(self.prior_anchors, labels)
cls_labels = cls_labels.to(device)
bbox_labels = bbox_labels.to(device)
bbox_masks = bbox_masks.to(device)
num_prior_anchors = bbox_masks[:,:, 0].sum() # (batch_size, 1)
# 第三步:计算损失
# 将预测的结果转换为 (batch_size, num_anchors, num_classes + 1), + 1 为背景类
conf_preds = conf_preds.view(batch_size, num_anchors, self.num_classes + 1)
# 计算分类损失
cls_loss = self.conf_loss(conf_preds, cls_labels)
# 计算位置损失
loc_loss = self.loc_loss(loc_preds, bbox_labels, bbox_masks)
all_loss = (cls_loss + self.alpha * loc_loss) / num_prior_anchors
return all_loss
def loc_loss(self, loc_preds, bbox_labels, bbox_masks):
"""计算位置损失
Args:
loc_preds (Tensor): 预测的位置结果,形状为 (batch_size, num_anchors, 4)
bbox_labels (Tensor): 真实的位置标签,形状为 (batch_size, num_anchors, 4)
bbox_masks (Tensor): 真实的位置标签的掩码,形状为 (batch_size, num_anchors, 4)
Returns:
Tensor: 位置损失
"""
# 第一步:计算损失
return F.l1_loss(loc_preds * bbox_masks, bbox_labels * bbox_masks, reduction='sum')
def conf_loss(self, conf_preds, cls_labels):
"""计算分类损失
Args:
conf_preds (Tensor): 预测的分类结果,形状为 (batch_size, num_anchors, num_classes)
cls_labels (Tensor): 真实的分类标签,形状为 (batch_size, num_anchors, 1)
Returns:
Tensor: 分类损失
"""
# 第一步:计算正样本的损失
# 获取正样本的索引
pos_mask = cls_labels > 1
# 获取正样本的数量
num_pos = pos_mask.long().sum(dim=1, keepdim=True) # (batch_size, 1)
# 计算正样本的损失, 交叉熵损失函数的输入为 (N, C) 和 (N, ),其中 N 为样本数量,C 为类别数量,会自动找到(N, C)中的对应的值,计算损失
pos_loss = F.cross_entropy( conf_preds.reshape(-1, conf_preds.shape[-1])[pos_mask.reshape(-1)], cls_labels[pos_mask])
# 第二步:计算负样本的损失
# 获取负样本的索引
neg_mask = cls_labels == 0
# 计算负样本的损失
neg_loss = F.cross_entropy(conf_preds.reshape(-1, conf_preds.shape[-1])[neg_mask.reshape(-1)], cls_labels[neg_mask])
# 第三步:计算损失
loss = pos_loss + neg_loss
# 返回损失
return loss
#-------------------------------#
# 计算预测结果
#-------------------------------#
def eval(self, net_output, labels, show_img_flag=False):
"""计算准确率
Args:
net_output (tuple): 网络输出,包含回归预测和分类预测,形状为 (loc_preds (1, num_anchors, 4), conf_preds (1, num_anchors, 21))
labels (Tensor): 标签,形状为 (n, 5),其中 n 是所有边界框的数量, 5 表示 (类别, x, y, w, h)
Returns:
Tensor: 损失值
"""
# 第一步:获取网络输出 (1, num_anchors, 4), (1, num_anchors, 21)
loc_preds, conf_preds = net_output
batch_size, device = len(labels), loc_preds.device
# self.prior_anchors (num_anchors, 4)
num_anchors = self.prior_anchors.shape[0]
# 第二步:为不同大小的特征层生成对应的 anchors 找到对应 target 标号, 并且将其转换为相对于 anchor 的偏移量
bbox_labels, bbox_masks, cls_labels = multibox_target(self.prior_anchors, labels)
cls_labels = cls_labels.to(device)
bbox_labels = bbox_labels.to(device)
bbox_masks = bbox_masks.to(device)
num_prior_anchors = bbox_masks[:,:, 0].sum() # (1,)
# 第三步:计算准确度
# 计算分类准确度
cls_acc = self.cls_eval(conf_preds, cls_labels) / (batch_size * num_anchors)
#计算分类损失
cls_loss = self.conf_loss(conf_preds, cls_labels) # / (batch_size * num_anchors)
# 计算位置损失
bbox_loss = self.bbox_eval(loc_preds, bbox_labels, bbox_masks) # / (batch_size * num_anchors)
# 返回准确度
return cls_acc, cls_loss / num_prior_anchors , bbox_loss / num_prior_anchors
def cls_eval(self, cls_preds, cls_labels):
# 由于类别预测结果放在最后一维,argmax需要指定最后一维。
return float((cls_preds.argmax(dim=-1).type(cls_labels.dtype) == cls_labels).sum())
def bbox_eval(self, bbox_preds, bbox_labels, bbox_masks):
return float((torch.abs((bbox_labels - bbox_preds) * bbox_masks)).sum())
其中 multibox_target 函数的作用为 :为不同大小的特征层生成对应的 anchors 找到对应 target 标号, 并且将其转换为相对于 anchor 的偏移量
def multibox_target(anchors, labels):
""" 使用真实边界框标记锚框
Args:
anchors (Tensor): 先验框,对应的大小为,(num_anchors, 4)
labels (Tensor): 多个图片的真实标签,(batch_size, num_labels, 4) 都是 corner 的形式
Returns:
bbox_offset (batch_size, num_boxes, 4)
bbox_mask (batch_size, num_boxes, 4)
class_labels (batch_size, num_boxes, 1)
"""
# labels 为多个图片的box的标签合集,维度为 [batch_size, num_gt, 4 + 1], 其中 1 为类别
batch_size, anchors = len(labels), anchors.squeeze(0)
batch_offset, batch_mask, batch_class_labels = [], [], []
device, num_anchors = anchors.device, anchors.shape[0]
for i in range(batch_size):
# 取出第 i 张图片对应的 box 的 gt
label = labels[i]
# 找到和标签 box 最接近的真实标签框,作为训练的正样本
anchor_bbox_map = assign_anchor_to_bbox(label[:, :4], anchors, device)
# 构造 mask 矩阵,大于零的我们认为找打了相应的gt,扩展到4维的目的是为了后面bbox的四个点的mask
bbox_mask = ((anchor_bbox_map >= 0).float().unsqueeze(-1)).repeat(1, 4)
# 将类标签和分配的边界框坐标初始化为0
class_labels = torch.zeros(num_anchors, dtype=torch.long, device=device)
assigned_bbox = torch.zeros((num_anchors, 4), dtype=torch.float32, device=device)
# 使用真实边界框来标记锚框的类别
# 如果一个锚框没有被分配,标记为背景,值为零
indices_true = torch.nonzero(anchor_bbox_map >= 0)
# 拿出已经分配好的锚框对应的 gt bbox
bbox_idx = anchor_bbox_map[indices_true]
# 将类别和对应的标签进行赋值。label + 1 的原因是为了和 0 进行区别。
class_labels[indices_true] = label[bbox_idx, 4].long() + 1
assigned_bbox[indices_true] = label[bbox_idx, :4].float()
# 偏移量的转换,得到真实框和对应anchor之间的位置偏移
offset = offset_boxes(anchors, assigned_bbox) * bbox_mask
# 记录一下对应的关系
batch_offset.append(offset)
batch_mask.append(bbox_mask)
batch_class_labels.append(class_labels)
bbox_offset = torch.stack(batch_offset)
bbox_mask = torch.stack(batch_mask)
class_labels = torch.stack(batch_class_labels)
return bbox_offset, bbox_mask, class_labels
训练
定义相关的优化器、学习率等,我们就可以开始我们的训练了;具体训练代码如下;文章来源:https://www.toymoban.com/news/detail-469803.html
if __name__ == "__main__":
# -------------------超参数-------------------#
batch_size = 32
num_workers = 4
input_size = (3, 300, 300)
num_classes = 20
learning_rate = 1e-2
epochs = 100
weight_decay = 5e-4
root_path = "./data"
# -------------------超参数-------------------#
# 设置使用的设备
# device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
device = torch.device("cuda:1" if torch.cuda.is_available() else "cpu")
# 第一步:加载数据集
train_iter, test_iter = load_data(root_path, batch_size, num_workers)
# 第二步:定义模型
net = SSD(input_size, num_classes)
net.to(device)
# summary(net,input_size=(3, 300, 300))
# 第三步:定义损失函数
Loss = MultiBoxLoss(num_classes, device)
# 第四步:定义优化器
optimizer = torch.optim.SGD(net.parameters(), lr=learning_rate, momentum=0.9, weight_decay=weight_decay)
# 第五步:训练模型
train_day = datetime.now().strftime("%Y_%m_%d_%H_%M_%S")
print("#", "-"*30, "训练参数", "-"*30, "#")
print("训练日期:{0:>65}".format(train_day))
print("训练设备:{0:>65}".format(str(device)))
print("训练数据集大小:{0:>59}".format(len(train_iter) * batch_size))
print("测试数据集大小:{0:>59}".format(len(test_iter) * batch_size))
print("训练批次大小:{0:>61}".format(batch_size))
print("训练轮次:{0:>65}".format(epochs))
print("学习率:{0:>67}".format(learning_rate))
print("权重衰减:{0:>65}".format(weight_decay))
print("#", "-"*30, "训练开始", "-"*30, "#")
train_file = "./log/train_log_" + train_day
os.makedirs(train_file, exist_ok=True)
min_loss = 1e+10
for epoch in range(epochs):
net.train()
phgr = tqdm(train_iter, total=len(train_iter), desc="Train epoch " + str(epoch + 1) + "/" + str(epochs))
epoch_train_losses = []
for i, (images, labels) in enumerate(phgr):
# 将数据转换为 cuda 的 tensor
images = images.to(device)
# 前向传播
net_output = net(images)
# 计算损失
net_loss = Loss(net_output, labels)
loss = net_loss.item()
epoch_train_losses.append(loss)
# 反向传播
optimizer.zero_grad()
net_loss.backward()
optimizer.step()
phgr.set_postfix({"loss": loss})
# 保存最优模型
epoch_train_loss = (sum(epoch_train_losses) / len(epoch_train_losses))
print("epoch_train_loss:", epoch_train_loss, " min_loss:", min_loss)
if epoch_train_loss < min_loss:
min_loss = epoch_train_loss
save_weight_path = train_file + f"/ssd_best_loss.pth"
torch.save(net.state_dict(), save_weight_path)
if epoch % 5 == 0 or epoch == epochs - 1:
net.eval()
epoch_test_losses = []
show_img_flag = True
with torch.no_grad():
phgr_test = tqdm(test_iter, total=len(test_iter), desc="Test epoch " + str(epoch + 1) + "/" + str(epochs))
for images, labels in phgr_test:
# 将数据转换为 cuda 的 tensor
tensor_images = images.to(device)
# 前向传播
net_output = net(tensor_images)
if show_img_flag:
# 显示第一张图片的预测结果作为显示
# decoder_out = decoder(net_output, Loss.prior_anchors)
# out_frame = draw_infer_box(images[0], decoder_out[0], decoder_out[1], decoder_out[2], class_names, colors)
# cv2.imwrite("train_eval_result.png", out_frame)
show_img_flag = False
# 计算准确度
cls_acc, cls_loss, bbox_loss = Loss.eval(net_output, labels)
epoch_test_losses.append(cls_loss + bbox_loss)
phgr_test.set_postfix({"cls_acc": cls_acc," cls_loss": cls_loss.item(), " bbox_loss": bbox_loss})
epoch_test_loss = (sum(epoch_test_losses) / len(epoch_test_losses))
save_weight_path = train_file + f"/ssd_epoch_{epoch + 1}_testloss_{0:.3f}_trainloss_{0:.3f}.pth".format(epoch_test_loss, epoch_train_loss)
代码及参考
完整包含预测的代码地址为:
参考
1、沐神的动手学深度学习文章来源地址https://www.toymoban.com/news/detail-469803.html
到了这里,关于目标检测第三篇:基于SSD的目标检测算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!