文章来源地址https://www.toymoban.com/news/detail-470072.html
文章来源:https://www.toymoban.com/news/detail-470072.html
到了这里,关于ORB_SLAM2算法中特征点是如何精确匹配的?的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
这篇具有很好参考价值的文章主要介绍了ORB_SLAM2算法中特征点是如何精确匹配的?。希望对大家有所帮助。如果存在错误或未考虑完全的地方,请大家不吝赐教,您也可以点击"举报违法"按钮提交疑问。
文章来源地址https://www.toymoban.com/news/detail-470072.html
文章来源:https://www.toymoban.com/news/detail-470072.html
到了这里,关于ORB_SLAM2算法中特征点是如何精确匹配的?的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处: 如若内容造成侵权/违法违规/事实不符,请点击违法举报进行投诉反馈,一经查实,立即删除!
在前文我们已经安装运行了ORB_SLAM2,下载和编译(包括报错)在文章: ORB_SLAM2下载编译及运行EuRoC数据集_浅梦语11的博客-CSDN博客_euroc数据集下载 并且我们使用运行了EuRoC数据集。今天利用框架运行KITTI数据集。 注意 :如果没有运行成功EuRoC数据
CreateNewMapPoints 在 新插入的关键帧 的 邻近的关键帧 中,通过 词袋模型 与新插入关键帧中 没有匹配的 ORB特征进行匹配,并抛弃其中 不满足对极约束 的匹配点对,接着通过 三角化 生成地图点 GetBestCovisibilityKeyFrames :找出与当前关键帧 共视程度最高前nn帧 vpNeighKFs 如果是 I
单目+IMU模式下,前面的一些配置完成后,处理第一帧图像时: 1、每帧图像都会调用该函数: 目的:使灰度直方图分布较为均匀,从而使整体对比度更强,便于后面特征点的提取等工作; 2、第一帧图像(ni=0)时无IMU数据(vImuMeas容器为空),进入下面的这个函数: 该函数先
参考https://blog.csdn.net/weixin_42990464/article/details/133019718?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522171109916816777224423276%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257Drequest_id=171109916816777224423276biz_id=0utm_medium=distribute.pc_search_result.none-task-blog-2 blog first_rank_ecpm_v1~rank_v31_ecpm

为什么重要?我们是在做什么事? 特征提取和匹配: 首先是两幅图像的特征提取,然后是对应特征点的匹配。接下来的工作是根据得到的匹配点对,估计相机的运动,具体根据相机分为三种方法: 单目相机:2D-2D: 对极几何 方法 双目或者RGBD相机: 3D-3D: ICP 方法 一个3D点
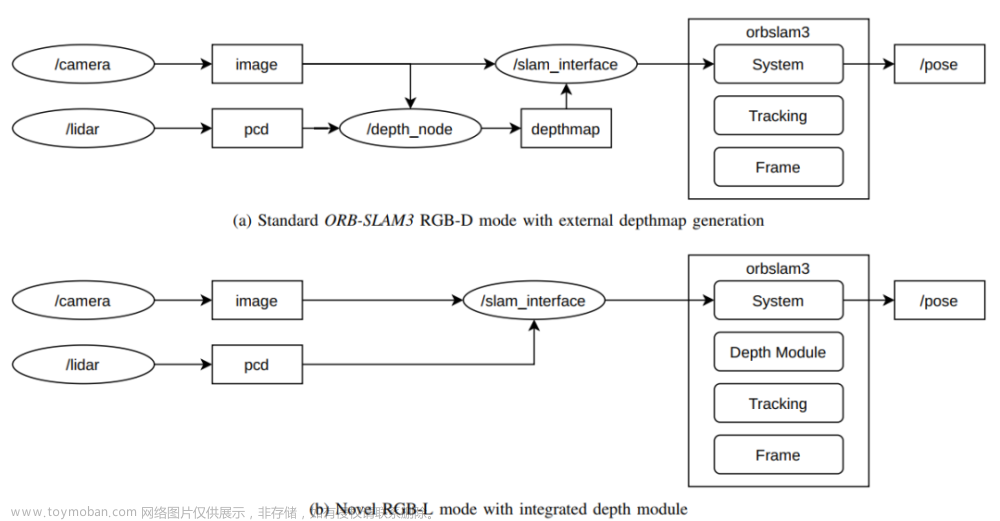
点云PCL免费知识星球,点云论文速读。 文章:RGB-L: Enhancing Indirect Visual SLAM using LiDAR-based Dense Depth Maps 作者:Florian Sauerbeck, Benjamin Obermeier, Martin Rudolph 编辑:点云PCL 代码:https://github.com/TUMFTM/ORB_SLAM3_RGBL.git 欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。文章仅

为什么重要?我们是在做什么事? 特征提取和匹配: 首先是两幅图像的特征提取,然后是对应特征点的匹配。接下来的工作是根据得到的匹配点对,估计相机的运动,具体根据相机分为三种方法: 单目相机:2D-2D: 对极几何 方法 双目或者RGBD相机: 3D-3D: ICP 方法 一个3D点

本文介绍ORB_SLAM3编译、运行中遇到问题,尤其涉及到ORB_SLAM3 ROS编译遇到的问题。最后通过使用D435I完成在室内环境下运行。 本文运行环境在Ubuntu20.04 + ROS noetic。 一、ORB_SLAM3 依赖安装 ORB_SLAM3 依赖的安装,有同学喜欢上来就baidu,按照别人介绍的安装,这样做大多数时候会出现

一、引言 ORB-SLAM2,它是基于单目、双目或RGB-D相机的一个完整的SLAM系统,其中包括地图重用、回环检测和重定位功能。这个系统可以适用于多种环境,无论是室内小型手持设备,还是工厂环境中飞行的无人机和城市中行驶的车辆,其都可以在标准CPU上实时运行。该系统的后端
先说方法:在加载的相机参数文件.yaml的最前面加上下面两行就行。 第一行表示从本地加载名为\\\"MH01_to_MH05_stereo_inertial.osa\\\"的地图文件,第二行表示保存名为\\\"MH01_to_MH05_stereo_inertial.osa\\\"的地图到本地。第一次运行建图时注释掉第一行,只使用第二行,加载地图重定位时反过来,



