目录
1 机器人小车的简单介绍
1.1 小车结构
2 开始测试和运动前的准备工作
2.1 创建并编译功能包practice:
2.1.1 创建功能包practice:
2.1.2 编译功能包practice:
2.2查看话题消息
3 代码分析
3.1 编写小车运动的py文件,并进行编译调试
3.2 launch一键启动文件
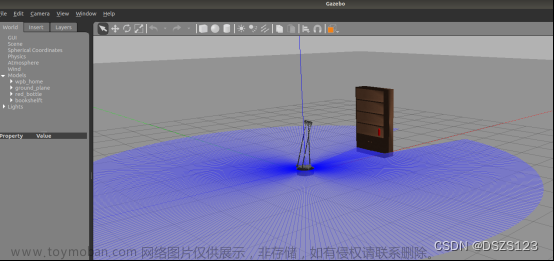
4 在仿真器中模拟小车路径
5 图案分析解释
6 实验原理:
7 算法流程及小车实际运行路线结果分析:
8 实验思路与分析体会
机器人小车运动控制设计
1 机器人小车的简单介绍
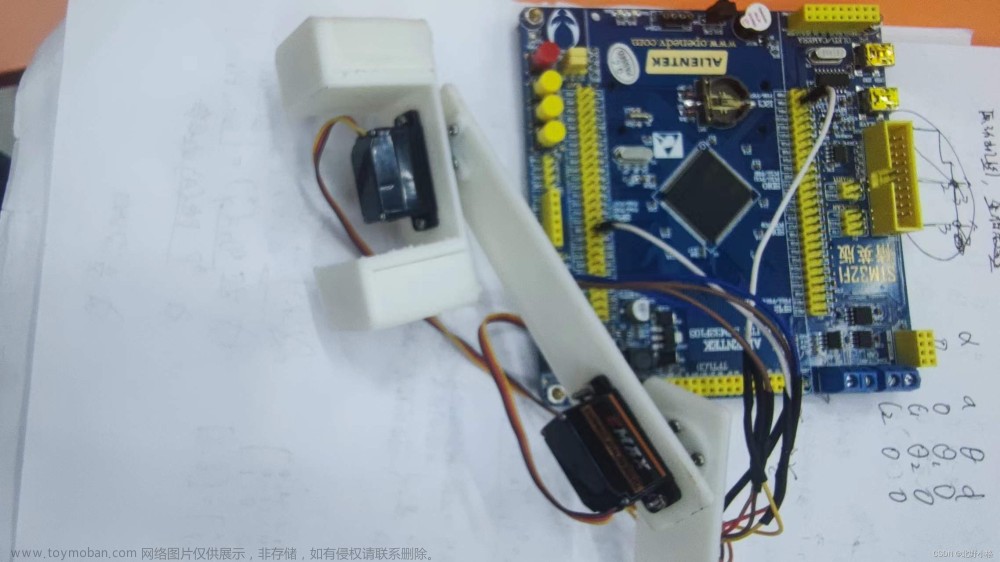
1.1 小车结构
本次实验采用的是EPRobot智能小车,EPRobot 智能小车是为本科、高职等不同人群计算机编程、机器人开发以及嵌入式 系统开发等方向定制开发的学习平台。EPRobot 基于最新的树莓派 4B 卡片式电脑开发,搭载深度定制的底盘控制器,让小车的功能与性能达到极致。文章来源:https://www.toymoban.com/news/detail-470850.html
与市面产品不同的是思岚 A1 文章来源地址https://www.toymoban.com/news/detail-470850.html
到了这里,关于ros机器小车运动控制的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!