摘要:本文简单介绍如何操作GPIO去点灯
适合群体:适用于Hi3861开发板,L0轻量系统驱动开发
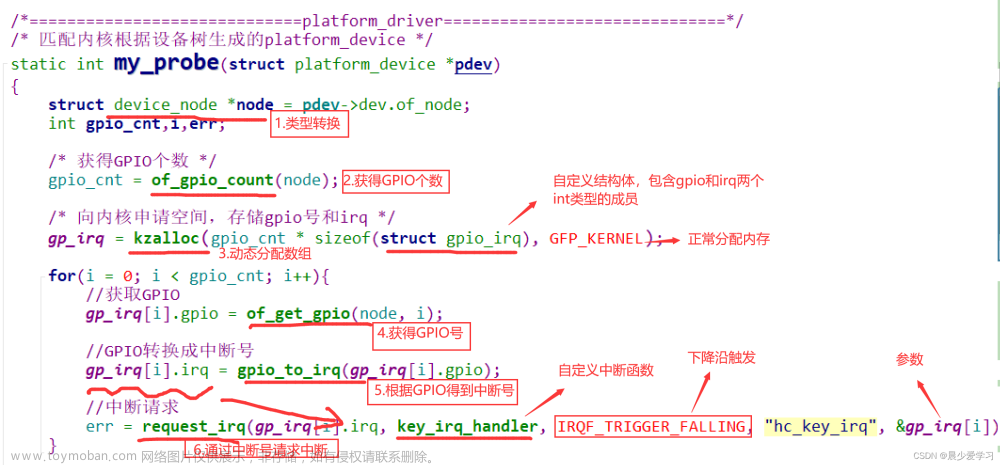
5.1点灯例程源码
先看最简单得LED灯闪烁操作
源码结构如下:

第一个BUILD.gn文件内容:
static_library("led_demo") {
sources = [
"led_demo.c"
]
include_dirs = [
"//utils/native/lite/include",
"//kernel/liteos_m/components/cmsis/2.0",
"//base/iot_hardware/peripheral/interfaces/kits",
]
}第二个BUILD.gn内容:
# Copyright (c) 2020 Huawei Device Co., Ltd.
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import("//build/lite/config/component/lite_component.gni")
lite_component("app") {
features = [
"led_demo:led_demo",
]
}led_demo.c内容:
#include <unistd.h>
#include "stdio.h"
#include "ohos_init.h"
#include "cmsis_os2.h"
#include "iot_gpio.h"
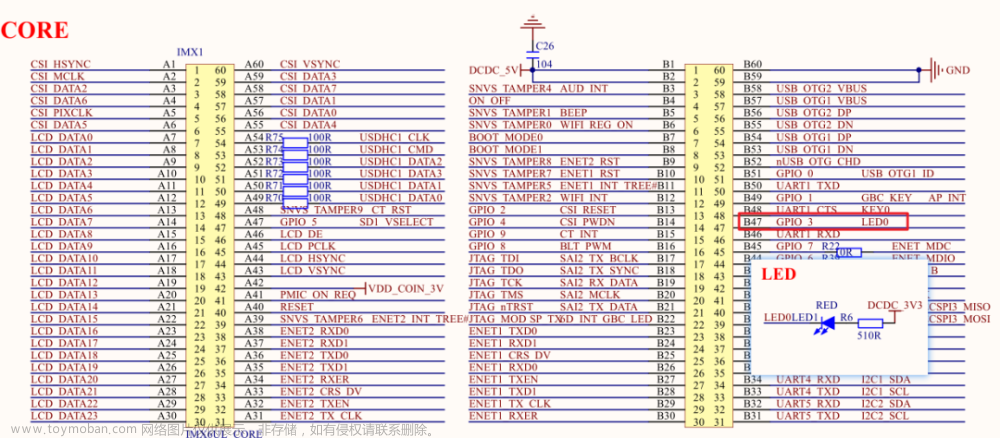
#define LED_TEST_GPIO 9 // for hispark_pegasus
void *LedTask(const char *arg)
{
//初始化GPIO
IoTGpioInit(LED_TEST_GPIO);
//设置为输出
IoTGpioSetDir(LED_TEST_GPIO, IOT_GPIO_DIR_OUT);
(void)arg;
while (1)
{
//输出低电平
IoTGpioSetDir(LED_TEST_GPIO, 0);
usleep(300000);
//输出高电平
IoTGpioSetDir(LED_TEST_GPIO, 1);
usleep(300000);
}
return NULL;
}
void led_demo(void)
{
osThreadAttr_t attr;
attr.name = "LedTask";
attr.attr_bits = 0U;
attr.cb_mem = NULL;
attr.cb_size = 0U;
attr.stack_mem = NULL;
attr.stack_size = 512;
attr.priority = 26;
if (osThreadNew((osThreadFunc_t)LedTask, NULL, &attr) == NULL) {
printf("[LedExample] Falied to create LedTask!\n");
}
}编译后烧录进去,应该可以看到复位按键旁边的LED灯一直在闪烁。

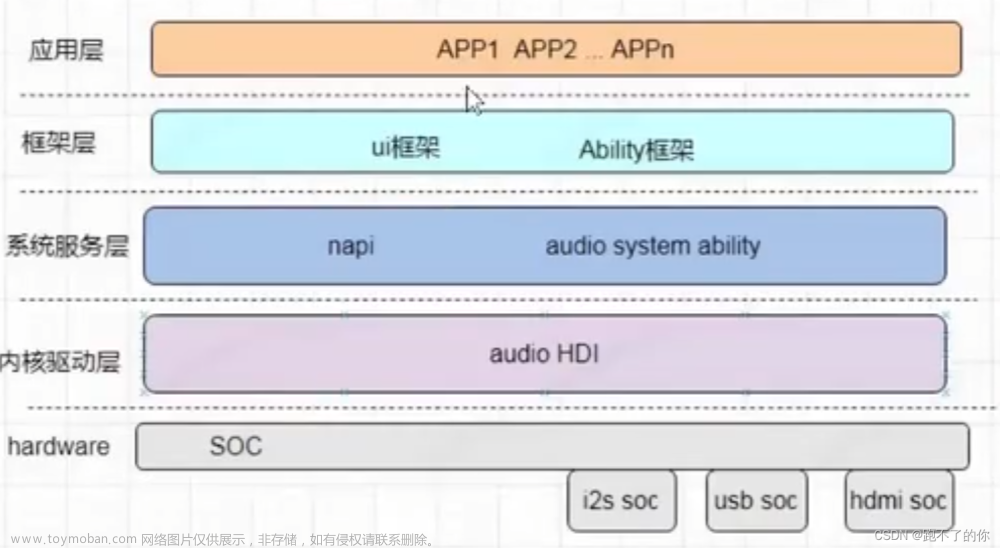
5.2 驱动框架
OpenHarmony为轻量系统提供了一套简单的驱动封装接口,函数的定义相关头文件位于“base\iot_hardware\peripheral\interfaces\kits”

这里只有头文件,具体的函数实现,需要在对应的soc中,具体路径定义由
device\board\hisilicon\hispark_pegasus\liteos_m\config.gni 文件中定义:

所以我们可以知道,具体的路径就是
“device\soc\hisilicon\hi3861v100\hi3861_adapter\hals\iot_hardware\wifiiot_lite”
相关文件如下:

这里是代码实现,具体是将hi3861相关的驱动接口封装成鸿蒙的驱动接口。
所以我们可以总结如下:
5.3 GPIO相

关接口函数
(1)相关枚举:
/**
* @brief 枚举 GPIO 电平值。
*/
类型定义枚举 {
/** 低 GPIO 电平 */
IOT_GPIO_VALUE0 = 0,
/** 高 GPIO 电平 */
IOT_GPIO_VALUE1
} IotGpioValue;
/**
* @brief 枚举 GPIO 方向。
*/
类型定义枚举 {
/** 输入 */
IOT_GPIO_DIR_IN = 0,
/** 输出 */
IOT_GPIO_DIR_OUT
} IotGpioDir;
/**
* @brief 枚举 GPIO 中断触发模式。
*/
类型定义枚举 {
/** 电平敏感中断 */
IOT_INT_TYPE_LEVEL = 0,
/** 边缘敏感中断 */
IOT_INT_TYPE_EDGE
} IotGpioIntType;
/**
* @brief 枚举 I/O 中断极性。
*/
类型定义枚举 {
/** 低电平或下降沿中断 */
IOT_GPIO_EDGE_FALL_LEVEL_LOW = 0,
/** 高电平或上升沿中断 */
IOT_GPIO_EDGE_RISE_LEVEL_HIGH
} IotGpioIntPolarity;(2)普通GPIO相关API文章来源:https://www.toymoban.com/news/detail-471693.html
/**
* @brief 表示 GPIO 中断回调。
*
*/
typedef void (*GpioIsrCallbackFunc) (char *arg);
/**
* @brief 初始化一个 GPIO 设备。
*
* @param id 表示 GPIO 引脚号。
* @return 如果 GPIO 设备已初始化,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioInit(unsigned int id);
/**
* @brief 取消初始化 GPIO 设备。
*
* @param id 表示 GPIO 引脚号。
* @return 如果 GPIO 设备被取消初始化,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioDeinit(unsigned int id);
/**
* @brief 设置 GPIO 引脚的方向。
*
* @param id 表示 GPIO 引脚号。
* @param dir 指示 GPIO 输入/输出方向。
* @return 如果设置了方向,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioSetDir(unsigned int id, IotGpioDir dir);
/**
* @brief 获取 GPIO 引脚的方向。
*
* @param id 表示 GPIO 引脚号。
* @param dir 指示指向 GPIO 输入/输出方向的指针。
* @return 如果获取到方向,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioGetDir(unsigned int id, IotGpioDir *dir);
/**
* @brief 设置 GPIO 引脚的输出电平值。
*
* @param id 表示 GPIO 引脚号。
* @param val 表示输出电平值。
* @return 如果设置了输出级别值,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioSetOutputVal(unsigned int id,IotGpioValue val);
/**
* @brief 获取 GPIO 引脚的输出电平值。
*
* @param id 表示 GPIO 引脚号。
* @param val 表示指向输出电平值的指针。
* @return 如果获得输出电平值,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioGetOutputVal(unsigned int id, IotGpioValue *val);
/**
* @brief 获取 GPIO 引脚的输入电平值。
*
* @param id 表示 GPIO 引脚号。
* @param val 表示指向输入电平值的指针。
* @return 如果获得输入电平值,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioGetInputVal(unsigned int id, IotGpioValue *val);(3)按键中断相关API文章来源地址https://www.toymoban.com/news/detail-471693.html
/**
* @brief 启用 GPIO 引脚的中断功能。
*
* 该函数可用于设置GPIO引脚的中断类型、中断极性和中断回调。
*
* @param id 表示 GPIO 引脚号。
* @param intType 表示中断类型。
* @param intPolarity 指示中断极性。
* @param func 表示中断回调函数。
* @param arg 表示指向中断回调函数中使用的参数的指针。
* @return 如果启用中断功能,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioRegisterIsrFunc(unsigned int id,IotGpioIntType intType,IotGpioIntPolarity intPolarity,
GpioIsrCallbackFunc fun,char *arg);
/**
* @brief 禁用 GPIO 引脚的中断功能。
*
* @param id 表示 GPIO 引脚号。
* @return 如果中断功能被禁用,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioUnregisterIsrFunc(unsigned int id);
/**
* @brief 屏蔽 GPIO 引脚的中断功能。
*
* @param id 表示 GPIO 引脚号。
* @param mask 表示中断函数是否被屏蔽。
* 值<b>1</b>表示屏蔽中断功能,<b>0</b>表示不屏蔽中断功能。
* @return 如果中断功能被屏蔽,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioSetIsrMask(unsigned int id, unsigned char mask);
/**
* @brief 设置 GPIO 引脚的中断触发模式。
*
* 此函数根据中断类型和中断极性配置 GPIO 引脚。
*
* @param id 表示 GPIO 引脚号。
* @param intType 表示中断类型。
* @param intPolarity 指示中断极性。
* @return 如果设置了中断触发模式,则返回 {@link IOT_SUCCESS};
* 否则返回 {@link IOT_FAILURE}。其他返回值详见芯片说明。
* @从 2.2 开始
* @2.2 版
*/
unsigned int IoTGpioSetIsrMode(unsigned int id, IotGpioIntType intType, IotGpioIntPolarity intPolarity);到了这里,关于OpenHarmony轻量系统开发【5】驱动之GPIO点灯的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!