一、SPI通信协议介绍
SPI通信协议(Serial Peripheral Interface)是一种同步串行通信协议,由Motorola公司在1980年代初开发。SPI协议常用于单片机、嵌入式系统和外围设备之间的通信。
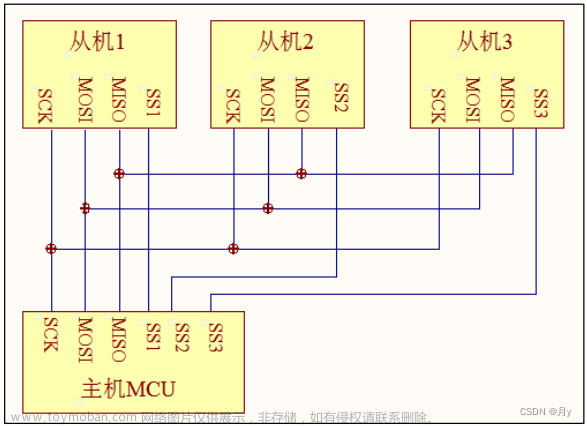
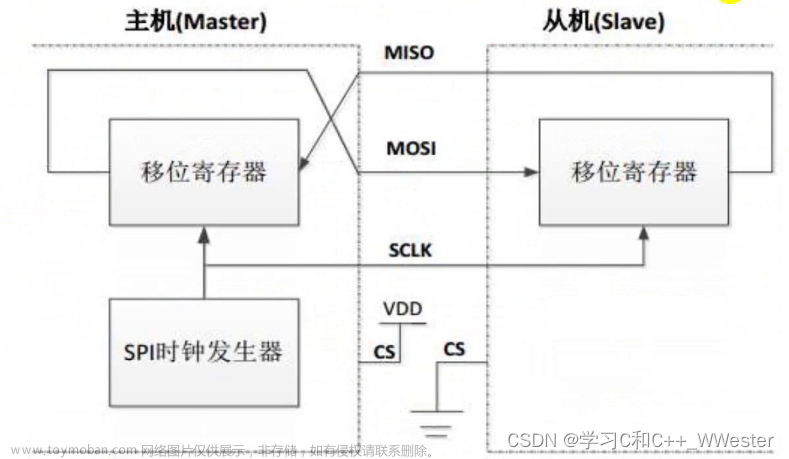
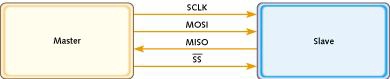
SPI协议使用四根线进行通信:时钟线(SCLK)、数据输入线(MOSI)、数据输出线(MISO)和从机选择线(SS)。主设备控制时钟线,每产生一个时钟脉冲,数据输入线上就会输出一个数据位,数据输出线上则会输入一个数据位。从机通过从机选择线来判断自己是否需要响应主设备的传输请求。
SPI协议具有以下特点:
速度较快:SPI通信协议采用同步传输方式,可以达到高速传输的目的,最高传输速率可以达到几十兆赫。
硬件实现简单:SPI协议的硬件实现非常简单,只需要几个IO口即可完成通信,并且不需要复杂的协议解析过程,因此对于资源受限的嵌入式系统非常适用。
支持全双工通信:SPI协议支持全双工通信,可以在同时发送和接收数据。
可靠性高:SPI协议的通信方式比较简单,理论上不容易出现通信错误,因此在工业环境中应用广泛。
局限性强:SPI通信协议无法支持大规模的多节点通信,也无法实现流控制和差错检测等高级功能。
二、以下是一个基于Arduino的SPI通信例程,在这个例程中,主设备(Arduino)通过SPI协议向从设备(示波器)发送命令并接收数据。文章来源:https://www.toymoban.com/news/detail-472036.html
#include <SPI.h>
// 定义SPI总线上从设备的选择引脚
#define SS_PIN 10
void setup() {
// 初始化串口和SPI总线
Serial.begin(9600);
SPI.begin();
// 配置从设备的选择引脚为输出模式
pinMode(SS_PIN, OUTPUT);
// 激活从设备
digitalWrite(SS_PIN, LOW);
// 发送初始化指令
SPI.transfer(0x55);
// 等待500ms
delay(500);
// 获取示波器采集到的数据
byte data = SPI.transfer(0xAA);
// 关闭从设备
digitalWrite(SS_PIN, HIGH);
// 输出采集到的数据
Serial.println(data, HEX);
}
void loop() {
// 主程序循环体
}在这个例程中,我们首先定义了SPI总线上从设备的选择引脚,并在setup函数中初始化了串口和SPI总线。然后,我们将从设备的选择引脚设置为输出模式,并激活从设备。接着,我们使用SPI.transfer函数向从设备发送初始化指令,并等待500ms。最后,我们再次调用SPI.transfer函数获取从设备返回的数据,并将从设备关闭。在loop函数中,我们可以添加其他需要执行的操作。文章来源地址https://www.toymoban.com/news/detail-472036.html
到了这里,关于SPI通信协议及基于Arduino的SPI通信例程的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!