前言
最近在学习使用hal库,之前都是用标准库来写32代码,所以发个帖子记录一下学习过程,同时也希望能帮助到一些也在学习HAL库的同学。
接下来进入正题
一、串口中断是什么?
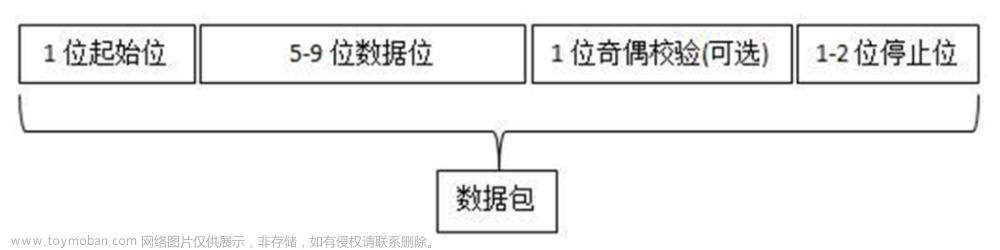
串口中断是指当单片机收到一个串口数据时,单片机会产生一个中断信号,通知处理器中断服务程序去处理这个接收到的数据。在中断服务程序中,我们可以读取串口接收缓冲区中的数据,并根据具体的应用场景进行处理,例如存储、显示、计算等操作。
串口中断一般通过使用串口的中断接收功能实现。当有新的数据到达串口时,单片机会产生一个中断请求,触发中断服务程序。中断服务程序在处理完接收到的数据后,可以根据具体的应用需求采取相应的处理措施。相比于轮询方式,采用中断的方式可以大大提高单片机的效率,减少了资源浪费,同时也可以避免数据丢失等问题。
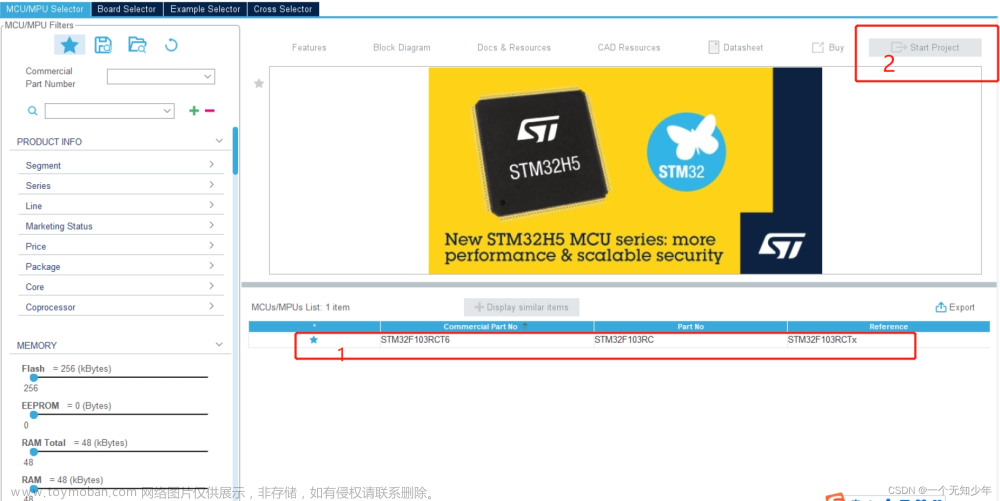
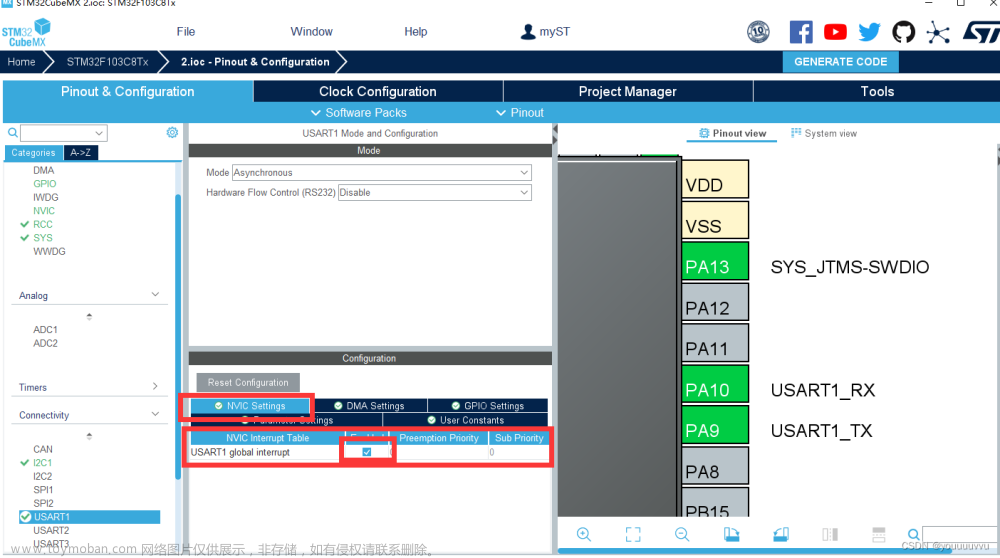
二,Stm32CubeMX配置
1,首先在主页面选择你的32芯片
















二,逻辑代码编写

这是才初始化后的main函数
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 96;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */ 


1,首先介绍一个函数
HAL_UART_Transmit
先尝试一下简单的串口发送数据,就只用这个函数就足够了,

char msg[] = "Hello, world!";
HAL_UART_Transmit(&huart1, (uint8_t*)msg, strlen(msg), 1000);
#include "string.h"编译运行一下

下载到stm32里,打开串口助手,选择串口号还有波特率等参数(这个助手就叫串口调试助手,微软商店可以直接下载,没有的同学,我会在文章末尾放上网盘链接)

现象就是一直发送Hello World
这是直接使用串口发送数据,并没有用到中断
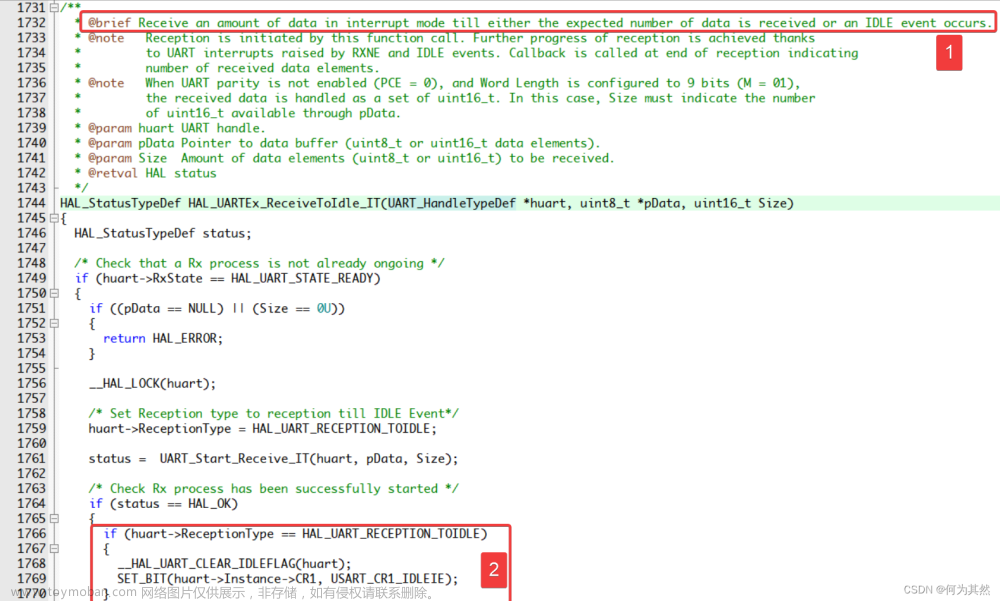
2,下面我使用一下中断试一试



进去后一直往下翻,找串口接受的回调函数

__weak void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(huart);
/* NOTE: This function should not be modified, when the callback is needed,
the HAL_UART_RxCpltCallback could be implemented in the user file
*/
}回到main函数里


void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1) // ???????????? USART1
{
if (rx_data[0] == '0') // ??????????? 0
{
HAL_UART_Transmit_IT(&huart1, (uint8_t*)tx_data2, strlen(tx_data2)); // ?????
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_0,GPIO_PIN_SET);
}
if (rx_data[0] == '1') // ??????????? 0
{
HAL_UART_Transmit_IT(&huart1, (uint8_t*)tx_data3, strlen(tx_data3)); // ?????
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_0,GPIO_PIN_RESET);
}
HAL_UART_Receive_IT(&huart1, (uint8_t*)rx_data, sizeof(rx_data)); // ???? UART ????
}
}

HAL_UART_Receive_IT(&huart1, rx_data, 1);最终现象

stm32串口中断
工程文件及串口助手(推荐使用串口调试助手)
链接:https://pan.baidu.com/s/1fQBR2Nd7U73QelpHmMcSHw?pwd=4qru
提取码:4qru
--来自百度网盘超级会员V1的分享文章来源:https://www.toymoban.com/news/detail-472172.html
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。文章来源地址https://www.toymoban.com/news/detail-472172.html
到了这里,关于stm32使用HAL库配置串口中断收发数据(保姆级教程)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!