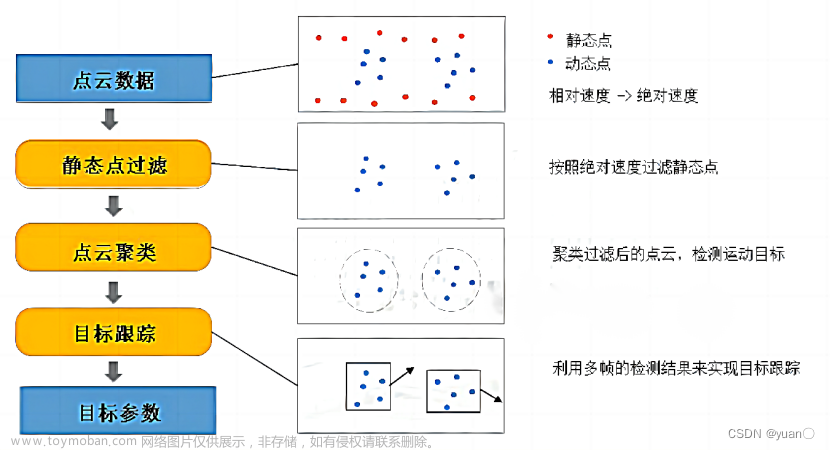
前言:
基于Apollo的preception与Autoware的lidar_apollo_cnn_seg_detect模块,并详细记录ROS系统上进行实时检测全部流程和踩坑,文章最后附上rosbag和rosbag的制作方法。参考文章:https://adamshan.blog.csdn.net/article/details/106157761?spm=1001.2014.3001.5502感谢大佬的杰作。
检测效果视频
环境
RTX 2060(后面关于算力)
ubuntu 18.04
ROS melodic (ubuntu 18.04安装ROS melodic可以参看我这篇文章ubuntu 18.04安装ROS系统)
CUDA 10.0
cudnn 7.6.5
caffe
cmake 3.18.2(不能低于3.12.2)
opencv 3.2.0
安装
ubuntu 18.04、ROS melodic 、CUDA 10.0、cudnn 7.6.5安装在此就不赘述。
caffe安装
分步执行,安装依赖项
sudo apt-get install -y libopencv-dev
sudo apt-get install -y build-essential cmake git pkg-config
sudo apt-get install -y libprotobuf-dev libleveldb-dev libsnappy-dev libhdf5-serial-dev protobuf-compiler
sudo apt-get install -y liblapack-dev
sudo apt-get install -y libatlas-base-dev
sudo apt-get install -y --no-install-recommends libboost-all-dev
sudo apt-get install -y libgflags-dev libgoogle-glog-dev liblmdb-dev
sudo apt-get install -y python-numpy python-scipy
sudo apt-get install -y python3-pip
sudo apt-get install -y python3-numpy python3-scipy
下载caffe开源软件项目(一定要在下载到home文件目录下)
cd ~
git clone https://github.com/BVLC/caffe

进入caffe/python/目录下,执行下面的命令,下载依赖的软件
cd caffe/python/
for req in $(cat requirements.txt); do pip3 install $req; done

下载本项目源码:
git clone https://github.com/AbangLZU/cnn_seg_lidar.git
将下载下来源码里面的Makefile.config复制到caffe文件夹下

更改Makefile.config里面的部分内容
CUDA_ARCH := -gencode arch=compute_30,code=sm_30 \
-gencode arch=compute_35,code=sm_35 \
-gencode arch=compute_50,code=sm_50 \
-gencode arch=compute_52,code=sm_52 \
-gencode arch=compute_61,code=sm_61
改为(这部分算力根据自己显卡型号来哈):
CUDA_ARCH := -gencode arch=compute_30,code=sm_30 \
-gencode arch=compute_35,code=sm_35 \
-gencode arch=compute_50,code=sm_50 \
-gencode arch=compute_52,code=sm_52 \
-gencode arch=compute_60,code=sm_60 \
-gencode arch=compute_61,code=sm_61 \
-gencode arch=compute_61,code=compute_61

改为(根据自己OpenCV版本来,我的是3.2.0):
OPENCV_VERSION :=3
注:如果不清楚自己opencv版本型号,输入下面命令产看版本:
pkg-config opencv --modversion

编译caffe
make -j8
make distribute
成功后如下图所示:

再编译本项目
首先要对源码做一部分修改(修改数据的topic,以便检测算法能读取数据):
修改cnn_seg_lidar/src/lidar_cnn_seg_detect/nodes/cnn_segmentation.cpp
如果不知道topic是啥,先运行下rosbag包,打开rviz看下

修改完后就可以再项目文件夹cnn_seg_lidar下编译了:
catkin_make
可能会报错:
-- Could NOT find jsk_recognition_msgs (missing: jsk_recognition_msgs_DIR)
-- Could not find the required component 'jsk_recognition_msgs'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by
"jsk_recognition_msgs" with any of the following names:
jsk_recognition_msgsConfig.cmake
jsk_recognition_msgs-config.cmake
解决方法:
sudo apt-get install ros-melodic-jsk-recognition-msgs
sudo apt-get install ros-melodic-jsk-rviz-plugins
此时再catkin_make就没问题了,成功如下:

然后我们下面开始制做rosbag
使用kitti2bag项目将kitti 的raw data转化为rosbag
其中需要将kitti2bag项目中的kitti2bag/kitti2bag.py 里面fill pcl msg中的反射强度i改成intensity,如下所示:
fields = [PointField('x', 0, PointField.FLOAT32, 1),
PointField('y', 4, PointField.FLOAT32, 1),
PointField('z', 8, PointField.FLOAT32, 1),
PointField('intensity', 12, PointField.FLOAT32, 1)]

下载kitti raw data中的一部分就行(如2011_09_26_drive_0101_sync.zip数据文件包括点云、图像等和2011_09_26_calib.zip标定文件,这两个组合起来用的,所以前面的数字要对应,不能不匹配),放在kitti2bag文件夹下

解压这两个文件:
unzip 2011_09_26_drive_0101_sync.zip
unzip 2011_09_26_calib.zip

开始转换:
python -m kitti2bag -t 2011_09_26 -r 0101 raw_synced .
可能会遇到下面错误:
ImportError: dynamic module does not define module export function (PyInit__tf2)
这是因为tf2是为了Python2写的,不适用于Python3,所以需要吧python换成ubuntu系统自带的2.7版本

此时在转换应该就没问题了,成功后界面如下:

在kitti2bag文件夹下应该就有了rosbag:

启动激光雷达点云三维目标检测
先启动ROS
roscore
再循环播放rosbag数据:
rosbag play kitti_2011_09_26_drive_0101_synced.bag -l --clock

然后在cnn_seg_lidar文件夹下打开终端:
source devel/setup.bash
roslaunch lidar_cnn_seg_detect lidar_cnn_seg_detect.launch
在cnn_seg_lidar文件夹下新开终端打开rviz:
rviz -d src/lidar_cnn_seg_detect/rviz_config/lidar_detect.rviz
点击Add(我是因为提前开了,所以有画面,正常情况下刚打开rviz是没这样的画面的)

选择如下

更改这里,就会显示雷达画面:

刚开始点云的点很小,可以改下尺寸:

最终检测画面如下所示:

至此全部完成。
测试rosbag链接:文章来源:https://www.toymoban.com/news/detail-474735.html
链接:https://pan.baidu.com/s/17Nqm4VzwoJxBGZOl2tnQwQ
提取码:k1us文章来源地址https://www.toymoban.com/news/detail-474735.html
到了这里,关于基于ROS的自动驾驶 激光雷达点云物体检测 项目实战的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!