一、HC-05蓝牙模块解析
1.简介
HC-05模块是一种基于蓝牙协议的简单无线通信设备,共有6个引脚,其中两个引脚通过stm32的两个含TX和RX的接口与之进行通信,一般用于无线控制,智能家居等。
2.HC-05原理
VCC:用于供电
GND:用于供电
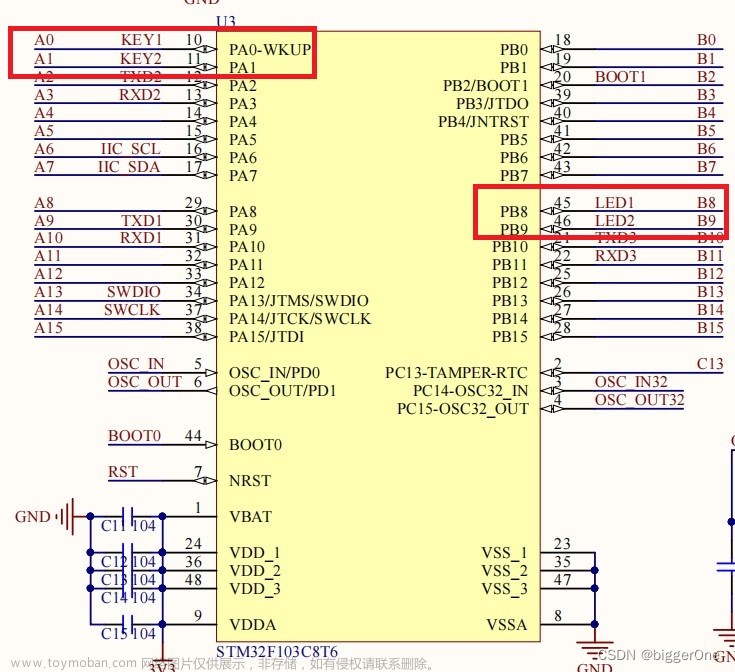
TX(发送):与单片机某一RX口进行通信
RX(接收):与单片机某一TX口进行通信
一句话,TX->RX,RX->TX.
//这里的TX与RX直接选某STM32一个USART的一对。
如下图
EN:使能,若置低电平,则模块被禁用
STATE:通过该引脚输出的高低电平可以知道蓝牙模块的状态,连接时输出高电平,断开时输出低电平。
在配置后使用蓝牙时,我一般不用EN和STATE这两个引脚

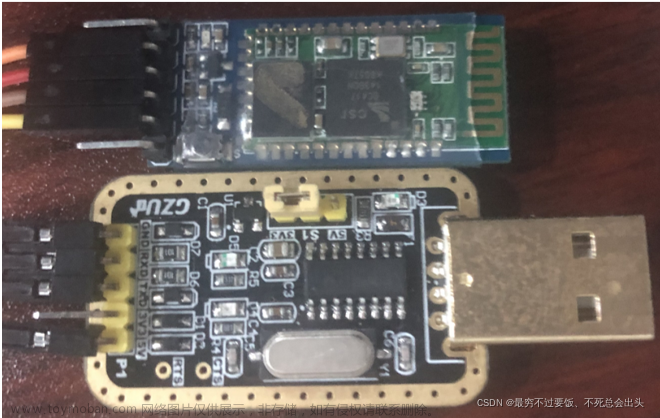
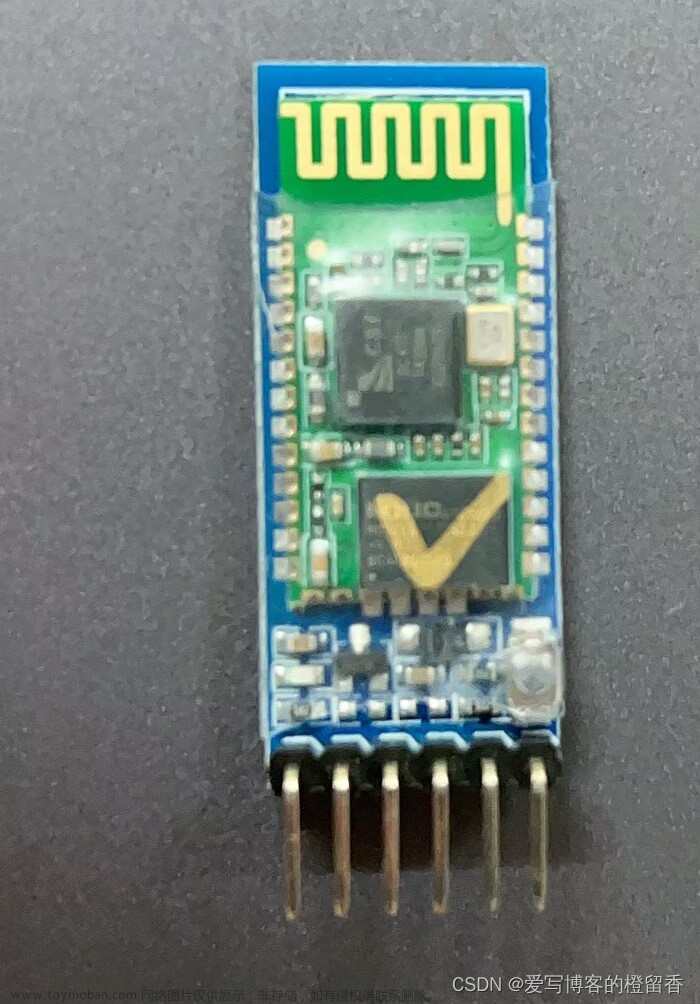
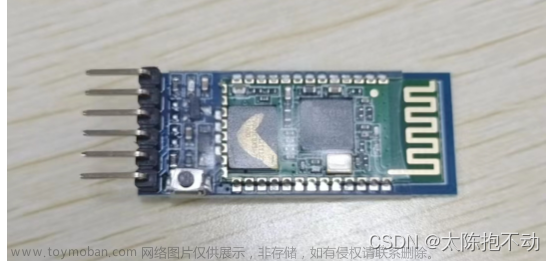
3.HC-05实物图


二、使用AT指令进行配置
1.进入命令响应工作模式
我使用PWLINK2和串口助手进行对其的配置,接线时,也采用TX->RX,RX->TX.
长按蓝牙模块的同时,给HC-05模块进行上电,与此同时,模块上的指示灯大概每隔1s闪烁一次,如视频所示,此时则说明已经进入了命令响应模式。
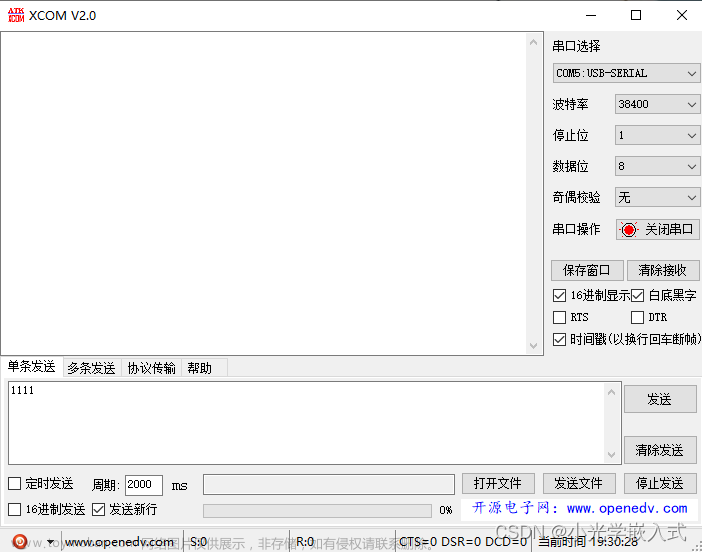
2.配置串口
我使用VOFA+来进行串口调试.
打开VOFA+,
设置接口为串口
设置数据引擎为RawData
设置波特率 38400
设置数据位 8 位
设置停止位 1 位
设置无校验位
如图
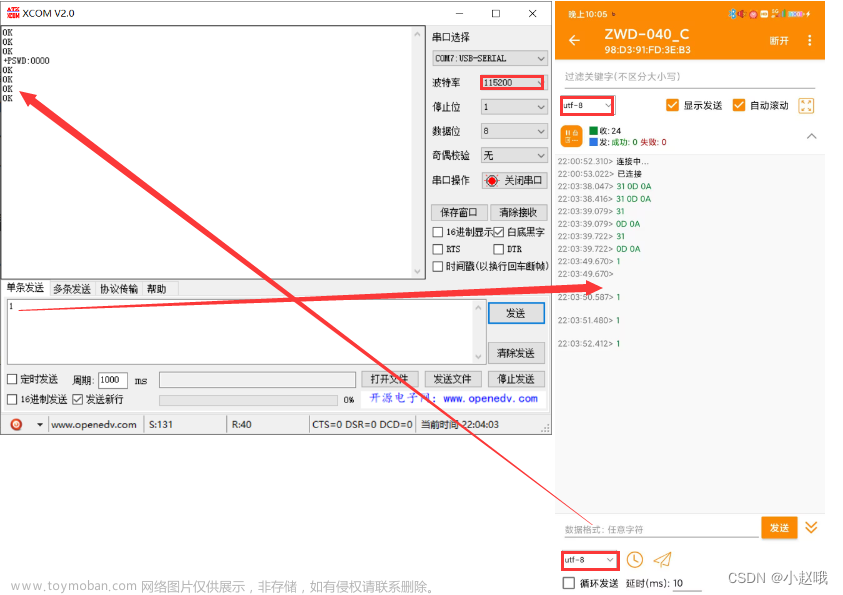
3.进行指令
1.测试指令:发送AT,得到回应OK
2.获取软件版本号:发送AT+VERSON,得到版本号
3.获取蓝牙地址:AT+ADDR,获得蓝牙地址
4.配置蓝牙模块名称:AT+NAME=“(名称)”
5.配置密码:AT+PSWD=(密码)(4位)
6.配置主从模式:AT+ROLE=0或1(0为从模式,1为主模式)
以上指令对初学者已经足够使用,多余的指令可以查找参考手册
状况如下图
3.和手机连接(使用手机软件蓝牙调试器)
三、使用stm32f103c8t6实现
1.思路
配置好串口后,当单片机接收到数据后,执行LED点亮的操作
2.代码
1.HC05.C
#include "stm32f10x.h" // Device header
//1.开启时钟,把需要用的USART和GPIO口的时钟打开
//2.GPIO初始化,把TX设为复用输出,RX设为输入
//配置USART,配置参数
#include <stdio.h>
#include <stdarg.h>
#include "HC05.h"
char HC05_RxPacket[100]; //"@MSG\r\n"
uint8_t HC05_RxData;//接收数据
uint8_t HC05_RxFlag;//接收标志位
void HC05_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//初始化TX,把TX配置成复用推挽输出
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
//TX是USART2控制的外设输出脚,选择复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//配置USART
USART_InitTypeDef USART_InitStructure;
//定义USART结构体
USART_InitStructure.USART_BaudRate = 9600;
//波特率数值
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//不使用流控
USART_InitStructure.USART_Mode = USART_Mode_Tx|USART_Mode_Rx;
//TX发送功能
USART_InitStructure.USART_Parity = USART_Parity_No;
//校验:不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1;
//停止位:1位停止位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
//字长:8位
USART_Init(USART1, &USART_InitStructure);
//初始化
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
//配置中断
USART_Cmd(USART1, ENABLE);
//供能
}
//发送一个字节数据的函数
void HC05_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
//函数的功能是通过外设USARTx发送单个数据。
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
//该标志位,当下一次再次使用SendData时,会自动清0
}
//发送多个字节数据(传递数组)
void HC05_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
HC05_SendByte(Array[i]);
}
}
//发送多个字符数据
//string类型自带标志位,无需长度限制
void HC05_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
HC05_SendByte(String[i]);
}
}
//求x的y次方函数
uint32_t HC05_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
//发送数字(可显示成字符串形式)
//利用先相除得到首位,后取余,发送出该一个数字
void HC05_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
HC05_SendByte(Number / HC05_Pow(10, Length - i - 1) % 10 + '0');
}
}
//重定向fputc
//printf的本质上是不断调用fputc()
//重定向后,只能该串口使用,其余串口无法使用
int fputc1(int ch, FILE *f)
{
HC05_SendByte(ch);
return ch;
}
void HC05_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
HC05_SendString(String);
}
//接收标志位判断
uint8_t HC05_GetRxFlag(void)
{
if ( HC05_RxFlag == 1)
{
HC05_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t HC05_GetRxData(void)
{
return HC05_RxData;
}
void HC05_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
HC05_RxData = USART_ReceiveData(USART1);
HC05_RxFlag = 1;
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
2.main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "HC05.h"
uint8_t RxData;
uint16_t AD0, AD1, AD2, AD3,AD4,AD5;
int main(void)
{
LED_Init();
HC05_Init();
while (1)
{
HC05_IRQHandler();
if (HC05_GetRxFlag() == 1)
{
RxData = HC05_GetRxData();
HC05_SendByte(RxData);
LED_ON();
}
}
}
3.视频如下
审核还没通过,通过之后补上,文章来源:https://www.toymoban.com/news/detail-475026.html
希望大家多多支持创作文章来源地址https://www.toymoban.com/news/detail-475026.html
到了这里,关于HC-05蓝牙模块与STM32控制led灯亮详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!