前言
EtherCAT(以太网控制自动化技术)是一个开放架构,以以太网为基础的现场总线系统,其名称的CAT为控制自动化技术(Control Automation Technology)字首的缩写。EtherCAT是确定性的工业以太网,最早是由德国的Beckhoff公司研发。
自动化对通讯一般会要求较短的信息更新时间(或称为周期时间)、信息同步时的通讯抖动量低,而且硬件的成本要低,EtherCAT开发的目的就是让以太网可以运用在自动化应用中。
机能原理
编辑 播报
一般工业通讯的网络各节点传送的资料长度不长,多半都比以太网帧的最小长度要小。而每个节点每次更新资料都要送出一个帧,造成带宽的低利用率,网络的整体性能也随之下降。EtherCAT利用一种称为“飞速传输”(processing on the fly)的技术改善以上的问题。 [1]
在EtherCAT网络中,当资料帧通过EtherCAT节点时,节点会复制资料,再传送到下一个节点,同时识别对应此节点的资料,则会进行对应的处理,若节点需要送出资料,也会在传送到下一个节点的资料中插入要送出的资料。每个节点接收及传送资料的时间少于1微秒,一般而言只用一个帧的资料就可以供所有的网络上的节点传送及接收资料。
通讯协定
编辑 播报
EtherCAT通讯协定是针对程序资料而进行优化,利用标准的IEEE 802.3以太网帧传递,Ethertype为0x88a4。其资料顺序和网站上设备的实体顺序无关,定址顺序也没有限制。主站可以和从站进行广播及多播等通讯。若需要IP路由,EtherCAT通讯协定可以放入UDP/IP资料包中。
性能
编辑 播报
EtherCAT的周期时间短,是因从站的微处理器不需处理以太网的封包。所有程序资料都是由从站控制器的硬件来处理。此特性再配合EtherCAT的机能原理,使得EtherCAT可以成为高性能的分散式I/O系统:包含一千个分散式数位输入/输出的程序资料交换只需30us,相当于在100Mbit/s的以太网传输125个字节的资料。读写一百个伺服轴的系统可以以10kHz的速率更新,一般的更新速率约为1–30kHz,但也可以使用较低的更新速率,以避免太频繁的直接内存存取影响主站个人电脑的运作。 [2]
拓扑
编辑 播报
EtherCAT使用全双工的以太网实体层,从站可能有二个或二个以上的埠。若设备没侦测到其下游有其他设备,从站的控制器会自动关闭对应的埠并回传以太网帧。由于上述的特性,EtherCAT几乎支持所有的网络拓扑,包括总线式、树状或是星状,现场总线常用的总线式拓扑也可以用在以太网中。
EtherCAT的拓扑可以用网络线、分枝或是短线(stub)作任意的组合。有三个或三个以上以太网接口的设备就可以当作分接器,不一定一定要用网络交换器。 由于使用100BASE-TX的以太网物理层,二个设备之间的距离可以到100米,一个EtherCAT区段的网络最多可以有65535个设备。若EtherCAT网络是使用环状拓扑(主站设备需要有二个通讯埠),则此网络还有缆线冗余的机能。
同步
编辑 播报
为了系统的同步,EtherCAT协定中有提供分散式时钟机制,即使通讯循环周期有抖动,时钟的抖动远小于1µs,大约接近IEEE 1588精密时间协议的标准。因此EtherCAT的主站设备不需针对时钟使用特殊的硬件,可以用软件实现在任何标准的的以太网MAC,即使没有特殊的通讯协处理器也没有关系。
标准建立分散式时钟的程序是由主站送出一特定位址的广播讯息给所有从站来启动。若使用环状拓扑,所有从站会在收到讯息时闩锁内部时钟,当讯息回来时会再闩锁内部时钟一次。主站会读所有从站闩锁的值,计算各个从站的延迟。为了消除抖动的影响及求得平均值,主站会尽可能的多次进行上述的程序。所有的从站延迟会依各从站在从站环状拓扑的位置来计算,并记录在一个偏移寄存器中。最后主站送出一个读写系统时钟的广播讯息,会使第一个从站的时钟为参考时钟,其他从站的内部时钟会调整到和第一个从站相同。
为了在初始化后保持时钟的同步,主站或从站需定期的再送出广播讯号,以计算各个从站内部时钟的速度差异,若有需要时,从站需要可以调整自身时钟的速度,或是有其他调整时钟的机制。
系统时钟是一个64位元的计时器,计数内容是从2000年1月1日0点0分开始所经过的时间,单位是纳秒(ns)。
设备行规
编辑 播报
设备行规(device profile)描述应用需要的参数及设备的机能特性,包括可能依设备种类而不同的状态机。总线技术中已有许多可靠的设备行规,例如I/O设备、驱动器或阀等设备。EtherCAT同时支持CANopen设备行规及Sercos驱动器行规。从CANopen或Sercos移植到EtherCAT时,在应用观点看到的内容是一様的,也可方便使用者或设备制造商的转换。
机能安全
编辑 播报
EtherCAT有一个加强的协定版本,称为Safety over EtherCAT,可以在同一个网络上进行机能安全相关的通讯和一般的控制通讯。此安全通讯是以EtherCAT的应用层为基础,不会影响底层的通讯协定。Safety over EtherCAT有通过IEC 61508的认证,符合安全完整性等级(SIL)3的要求。自2005年起已有使用Safety over EtherCAT的产品上市。
实现
编辑 播报
EtherCAT主站可以用软件,在标准的以太网媒体接入控制器中实现。许多供应商有提供在不同操作系统下的程式码,也有许多开源软件或共享软件。EtherCAT从站需要特殊的EtherCAT从站控制器,才能实现飞速传输(processing on the fly)的技术。EtherCAT从站控制器可以用FPGA来实现,且已有现成的代码,此控制器也可以用ASIC来实现。
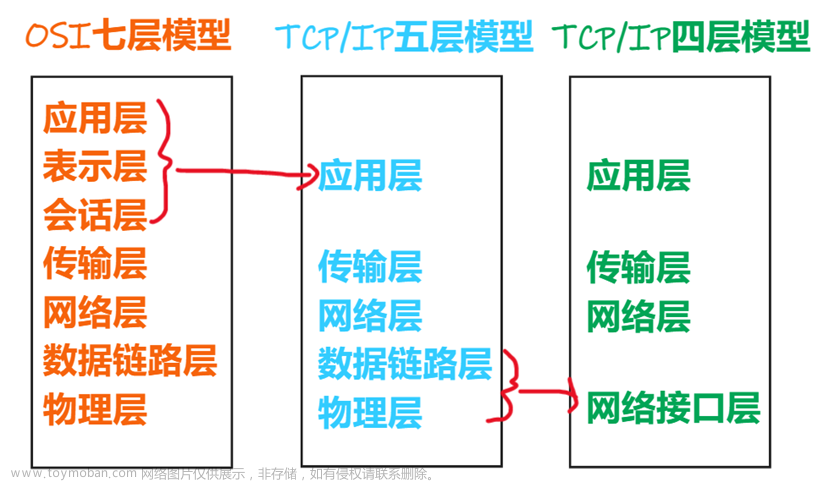
Ethercat与以太网的区别:
Ethercat修改了Ethernet数据链路层协议,将Ethernet的对等模式变成了主从模式,因此没有Ethernet的碰撞检测和载波监听。
![[工业互联-9]:EtherCAT(以太网控制自动化技术)+TwinCAT 在生产自动化控制中的应用 、](https://imgs.yssmx.com/Uploads/2023/06/476465-1.jpeg)
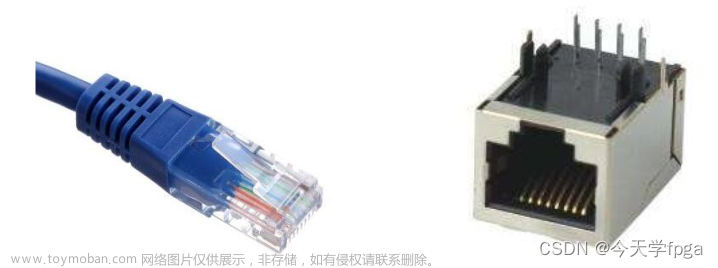
EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,它符合甚至降低了现场总线的使用成本。 EtherCat不使用标准的芯片,一般不使用交换机,软件也不是标准的,对以太网的数据帧进行了一些修改。
![[工业互联-9]:EtherCAT(以太网控制自动化技术)+TwinCAT 在生产自动化控制中的应用 、](https://imgs.yssmx.com/Uploads/2023/06/476465-2.jpeg)
Ethernet是工业以太网,EtherCAT是基于Ethernet的一种通信技术,通过独有的EtherCAT协议完成通信。通信性价比是目前为止最高的。ETG已经逐渐将各大设备制造厂家的设备(主站和伺服等)连接在了一起,EtherCAT本身的兼容性也得到了最大的发挥。
Ethercat协议栈
![[工业互联-9]:EtherCAT(以太网控制自动化技术)+TwinCAT 在生产自动化控制中的应用 、](https://imgs.yssmx.com/Uploads/2023/06/476465-3.png)
![[工业互联-9]:EtherCAT(以太网控制自动化技术)+TwinCAT 在生产自动化控制中的应用 、](https://imgs.yssmx.com/Uploads/2023/06/476465-4.png)
参考:
![[工业互联-9]:EtherCAT(以太网控制自动化技术)+TwinCAT 在生产自动化控制中的应用 、](https://imgs.yssmx.com/Uploads/2023/06/476465-5.jpeg)
![[工业互联-9]:EtherCAT(以太网控制自动化技术)+TwinCAT 在生产自动化控制中的应用 、](https://imgs.yssmx.com/Uploads/2023/06/476465-6.jpeg)
winCAT 的世界:基于 PC 的开放式控制技术
倍福推出的基于 PC 的控制技术定义了自动化领域的全球标准。
TwinCAT 3(The Windows Control and Automation Technology)是Beckhoff推出第一款基于PC的控制器。
在软件方面,1996 年推出的 TwinCAT(The Windows Control and Automation Technology,基于 Windows 的控制和自动化技术)自动化套件是倍福控制系统的核心部分。
通过与 TwinCAT 软件结合使用,基于开放性和高度可扩展性原则,构建优化协调的自动化解决方案。
TwinCAT 可将任何一个基于 PC 的系统转换为一个带多个 PLC、NC、CNC 和机器人实时操作系统的实时控制系统。
可模块化扩展的硬件和软件组件便于随时修改和添加功能,在需要时,控制解决方案具备的开放性不仅允许集成第三方组件,还可以为现有设备和系统定制改造方案,这样既能确保灵活性,又能保障客户的投资安全。
TwinCAT 3 为工程技术开辟了一条新的道路,并通过添加很多功能对实时内核进行扩展。
工程环境完全集成在微软的Visual Studio框架中,除了系统配置、运动控制、I/O和IEC61131 PLC编程语言之外,还可以进行编程和调试。
![[工业互联-9]:EtherCAT(以太网控制自动化技术)+TwinCAT 在生产自动化控制中的应用 、](https://imgs.yssmx.com/Uploads/2023/06/476465-7.png)
TwinCAT 3 自动化软件(2张)
使用这些编程语言能够创建可以在TwinCAT 3 实时内核中执行的模块。能够执行的模块数量几乎无限。TwinCAT 3中的任务数量也得到了显著提升。TwinCAT 3 实时内核环境使得模块能够装载到一个多核处理器的不同核上。
TwinCAT 是德国BECKHOFF公司开发的基于Windows 操作系统的控制软件,它是Windows操作系统下优先级最高的线程。它借助工业PC或者嵌入式PC的强大运算能力,使其变成一个功能强大的PLC及运动控制器,安装在生产现场实时控制各种生产设备。
TwinCAT 于 1995 年首次推出市场,现在有两种版本并存: TwinCAT 2 和 TwinCAT 3,以下简称 TC2 和 TC3。
TC2 是上世纪 90 年代的软件产品,针对单核 CPU 及 32 位操作系统开发设计。
TC3发布于2010年,支持32位或64位操作系统,支持多核CPU可以发挥全部 CPU 的运算能力。
TC3和TC2除了开发界面有所不同之外,编程、调试、通讯的原理和操作方法都几乎完全相同。
TC2由PLC Control、System Manager和Scope View 等3种软件实现的编程、配置、电子示波器功能。
TC3 把他们都作为插件集成在开发环境 Microsoft Visual Studio中,增加了C/C++和Matlab/Simulink,以及面向对象编程(OOP)的支持。
相对于传统的控制器, TwinCAT 为软控制器,最大的特点是软件与硬件分离。同样的程序可以运行在不同的PC上,也可以用来控制不同厂家的 IO 模块以及驱动器,兼容多种现场总线。
TwinCAT 软PLC与传统的PLC相比,CPU、存储器和内存资源都有了质的提升。运算速度快,尤其是传统 PLC 不擅长的浮点运算,比如多路温控、液压控制以及其它复杂算法时,TwinCAT PLC 可以轻松胜任。数据区和程序区仅受限于存储介质的容量。随着IT技术的发展,用户可以订购的存储介质CF卡、 Cfast卡及硬盘的容量越来越大,CPU的速度越来越快,价格也越来越便宜。因此TwinCAT PLC在需要处理和存储大量数据比如趋势、配方和文件时优势明显。
TwinCAT 软NC和传统的运动控制卡、运动控制模块一样,可以实现单轴定位运动、多轴联动、 3轴插补,也可以执行G代码文件。都是通过调用 IEC61131-3 中定义的标准的运动控制 FB来实现,与所有支持该标准的运动控制器厂商的指令集兼容。 Beckhoff公司开发了几乎所有驱动器接口类型Driver,包括总线通讯(CanOpen、 Sercos、 ProfiDrive 等)、脉冲控制、模拟量+编码器,因此TwinCAT NC 所控制的255个轴可以独立选择或者修改任意接口类型,而运动控制的PLC程序保持不变。由于运动控制器和PLC实际上工作于同一台PC,二者之间的通讯只是两个内存区之间的数据交换,其数量和速度都远非传统的运动控制器可比。这使得凸轮耦合、自定义轨迹运动时数据修改非常灵活,并且响应迅速。此外,Beckhoff公司还开发了基于 winCAT NC的多种扩展功能,包括机器人坐标变换及辅助功能、按位置序列表实现多轴联动的 FIFO 通道,飞剪功能,张力控制功能等等。这些扩展功能还在不断丰富中。文章来源:https://www.toymoban.com/news/detail-476465.html
TwinCAT的性能最主要依赖于CPU, Beckhoff公司提供PC控制平台的完整产品线,CPU从单核ARM9 400MHz到12核Intel Xeon 2.4 GHz,多达20几个性能等级。尽管控制器种类繁多,无论是安装在导轨上的EPC,还是安装在电柜内的Cabinet PC,还是集成到显示面板的面板式PC,其控制原理、软件操作都一模一样,同一套程序可以移值到任何一台PC-Based控制器上运行。所以用户在样机开发阶段选择相对高配的控制器以满足功能扩展的需求,而量产阶段功能需求已经稳定,就可以根据实际情况选择最经济合理的控制器。文章来源地址https://www.toymoban.com/news/detail-476465.html
到了这里,关于[工业互联-9]:EtherCAT(以太网控制自动化技术)+TwinCAT 在生产自动化控制中的应用 、的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!