目录
基本模型
创建基本模型
基本模型的复制
复杂模型
场景操作
聚焦
旋转
移动
场景视野
世界坐标系
基本介绍
原点
局部坐标系
基本模型
创建基本模型

基本模型的复制
创建基本模型之后,会在我们视野中心生成这个模型;当我们需要复制模型的时候,可以使用
“Duplicate”来进行复制,随后拖出来,不使其重叠,即可看到复制后的模型。或者使用快捷键“Ctrl + D”来进行操作。


复杂模型
在Unity中,是不提供创建复杂模型的。它本身是一个开发软件,并不是一个建模软件;故而需要通过其他建模软件来创建复杂模型,然后再导入到Unity中进行操作使用。
场景操作
聚焦
对一个游戏物体进行聚焦,可以有两种方式:
- 在Hierarchy面板双击游戏物体。
- 在Hierarchy面板选中游戏物体之后,按“f”键。(如果不行则尝试快捷键“shift + f”)
旋转
对游戏物体进行旋转,使用“Alt + 鼠标左键”。
移动
选中游戏物体的三个坐标轴进行固定方向的粗略移动。
如果需要精确的移动,就需要通过计算之后,在Inspector面板中进行操作:

场景视野

分为透视视野和平行视野两种,可以根据需要进行切换。
需要注意的一点:在透视视野中,选中了游戏物体后,我们使用鼠标右键时,是围绕自身进行转动;而在平行视野中,使用鼠标右键是围绕游戏物体进行转动的。
世界坐标系
基本介绍
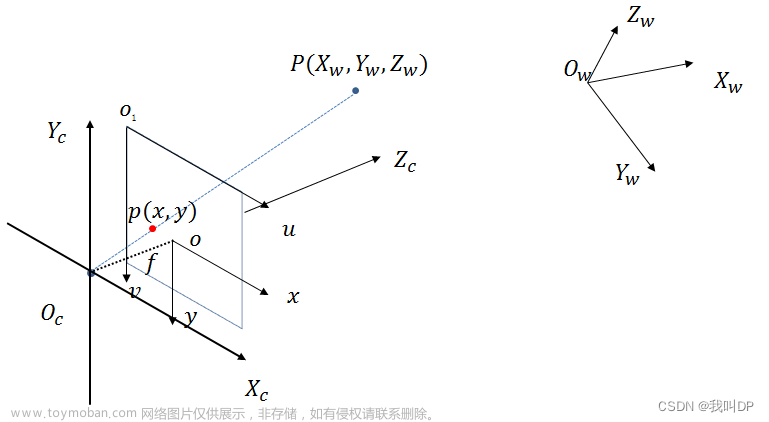
通常X轴代表左右方向,Z轴代表前后方向,Y轴代表上下方向。
MC(Minecraft)玩家可以直接联想这里的坐标轴知识。(狗头)
其中,高亮的轴表示该轴的正方向。
原点
世界坐标系的原点是固定的,可以通过Inspector面板对一个游戏物体设置其position来查看。

局部坐标系
当一个游戏物体里嵌套了另外一个游戏物体时,另外一个游戏物体就处于局部坐标系中。
而其原点就是其父游戏物体的位置。
每一个物体都有两个坐标,Position默认为局部坐标系。
(当一个游戏物体在父游戏物体内部时,它的坐标就为局部坐标;如果本身是父游戏物体的话,其局部坐标就相当于世界坐标。)
一个相对的概念:坐标是以“m(米)”作为单位的。一个Cube的体积为1m * 1m * 1m。
end文章来源:https://www.toymoban.com/news/detail-476596.html
学习自:siki学院——Unity3D入门课程文章来源地址https://www.toymoban.com/news/detail-476596.html
到了这里,关于初识Unity——基本模型、场景操作、世界坐标系和局部坐标系的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!