目录
1.算法描述
2.仿真效果预览
3.MATLAB核心程序
4.完整MATLAB
1.算法描述
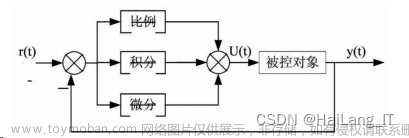
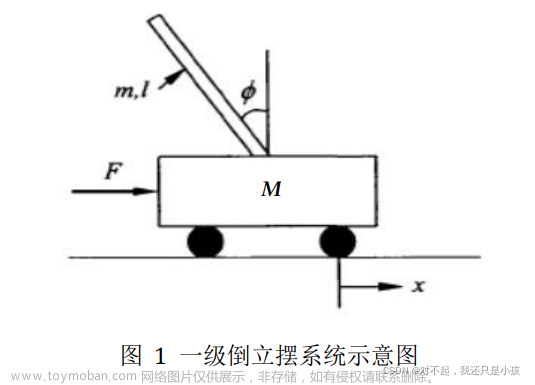
一个可以活动的小车上立着一根不稳定随时会倒下的杆。小车的轮子由电机控制,可以控制小车电机的转动力矩M。同时,也可以获取小车轮子转动的圈数N(可以精确到小数)和杆相对于垂直位置的倾角α.
不考虑车轮打滑, 小车所受力大小等于电机力矩乘车轮半径, 小车位置可以从转动圈数计算出, 小车可简化为最经典的一阶倒立摆:

对小车水平方向:
Mx¨+bx˙+N=F
对摆水平方向:
N=md2dt(x+lsinθ)
即:
N=mx¨+mlθ¨cosθ¨−mlθ˙2sinθ
对摆垂直方向:
P=mg+md2dt(lcosθ)
即:
P=mg−mlθ¨sinθ¨−mlθ˙2cosθ
关节力矩:
−Plsinθ−Nlcosθ=Iθ¨
令 ϕ=π+θ
在工作点 θ≈0 进行线性化: sinθ=0,cosθ=1,θ˙2=0 经过一顿操作化简之后能得到:
(I+ml2)ϕ¨−mglϕ=mlx¨ (M+m)x¨+bx˙−mlϕ¨=F=u
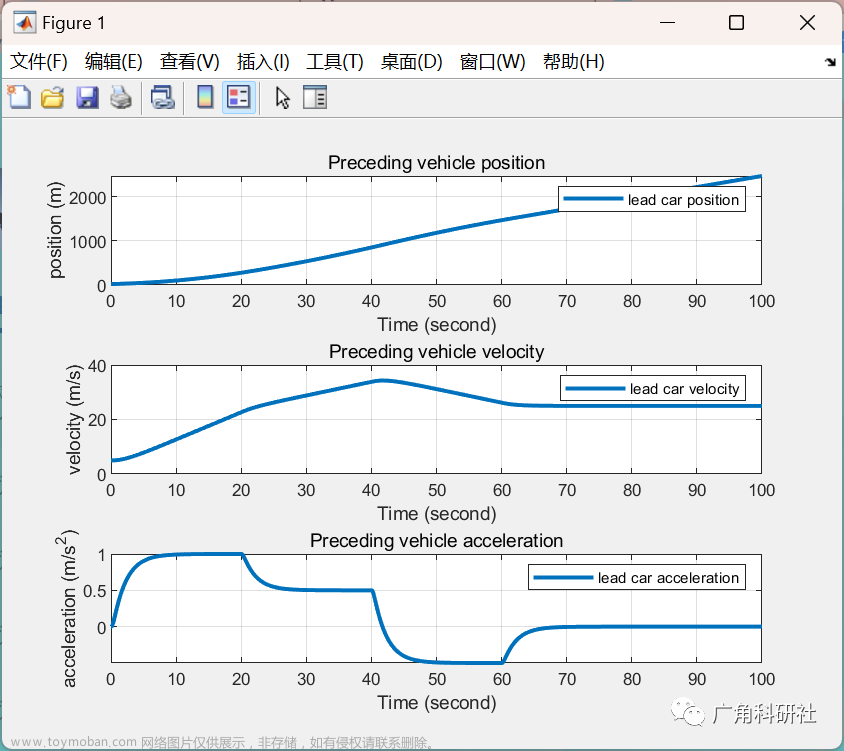
2.仿真效果预览
matlab2022a仿真如下:

 文章来源:https://www.toymoban.com/news/detail-478406.html
文章来源:https://www.toymoban.com/news/detail-478406.html
3.MATLAB核心程序
function varargout = pendulum(varargin)
% PENDULUM M-file for pendulum.fig
% PENDULUM, by itself, creates a new PENDULUM or raises the existing
% singleton*.
%
% H = PENDULUM returns the handle to a new PENDULUM or the handle to
% the existing singleton*.
%
% PENDULUM('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in PENDULUM.M with the given input arguments.
%
% PENDULUM('Property','Value',...) creates a new PENDULUM or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before pendulum_OpeningFunction gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to pendulum_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Copyright 2002-2003 The MathWorks, Inc.
% Edit the above text to modify the response to help pendulum
% Last Modified by SHE on 15-Dec-2008 22:08:58
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @pendulum_OpeningFcn, ...
'gui_OutputFcn', @pendulum_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before pendulum is made visible.
function pendulum_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to pendulum (see VARARGIN)
% Choose default command line output for pendulum
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes pendulum wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = pendulum_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
function edit1_Callback(hObject, eventdata, handles)
% hObject handle to edit1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit1 as text
% str2double(get(hObject,'String')) returns contents of edit1 as a double
%以字符串的形式来存储数据文本框1的内容。如果字符串不是数字,则现实空白内容
input =str2double(get(hObject,'String'));
%检查输入是否为空. 如果为空,则默认显示为0
if (isempty(input))
set(hObject,'String','0')
end
guidata(hObject, handles);
% --- Executes during object creation, after setting all properties.
function edit1_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
function edit2_Callback(hObject, eventdata, handles)
% hObject handle to edit2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit2 as text
% str2double(get(hObject,'String')) returns contents of edit2 as a double
%以字符串的形式来存储数据文本框2的内容。如果字符串不是数字,则现实空白内容
input =str2double(get(hObject,'String'));
%检查输入是否为空. 如果为空,则默认显示为0
if (isempty(input))
set(hObject,'String','0')
end
guidata(hObject, handles);
% --- Executes during object creation, after setting all properties.
function edit2_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
function edit3_Callback(hObject, eventdata, handles)
% hObject handle to edit3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit3 as text
% str2double(get(hObject,'String')) returns contents of edit3 as a double
%以字符串的形式来存储数据文本框3的内容。如果字符串不是数字,则现实空白内容
input =str2double(get(hObject,'String'));
%检查输入是否为空. 如果为空,则默认显示为0
if (isempty(input))
set(hObject,'String','0')
end
guidata(hObject, handles);
% --- Executes during object creation, after setting all properties.
function edit3_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
function edit4_Callback(hObject, eventdata, handles)
% hObject handle to edit4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit4 as text
% str2double(get(hObject,'String')) returns contents of edit4 as a double
%以字符串的形式来存储数据文本框4的内容。如果字符串不是数字,则现实空白内容
input =str2double(get(hObject,'String'));
%检查输入是否为空. 如果为空,则默认显示为0
if (isempty(input))
set(hObject,'String','0')
end
guidata(hObject, handles);
% --- Executes during object creation, after setting all properties.
function edit4_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
function edit5_Callback(hObject, eventdata, handles)
% hObject handle to edit5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit5 as text
% str2double(get(hObject,'String')) returns contents of edit5 as a double
%以字符串的形式来存储数据文本框5的内容。如果字符串不是数字,则现实空白内容
input =str2double(get(hObject,'String'));
%检查输入是否为空. 如果为空,则默认显示为0
if (isempty(input))
set(hObject,'String','0')
end
guidata(hObject, handles);
% --- Executes during object creation, after setting all properties.
function edit5_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
% --- Executes on selection change in popupmenu1.
function popupmenu1_Callback(hObject, eventdata, handles)
% hObject handle to popupmenu1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = get(hObject,'String') returns popupmenu1 contents as cell array
% contents{get(hObject,'Value')} returns selected item from popupmenu1
popup_sel_index = get(handles.popupmenu1, 'Value');
popup_sel_index = get(handles.popupmenu1, 'Value');
switch popup_sel_index
case 1
set(handles.text10 ,'String','期望极点');
set(handles.text11 ,'String',' -10 -10');
set(handles.text12 ,'String','-2+2*sqrt(3)*i -2-2*sqrt(3)*i');
case 2
set(handles.text10 ,'String','加权矩阵');
set(handles.text11 ,'String','Q=[1 0 0 0; 0 0 0 0; 0 0 1 0;0 0 0 0];');
set(handles.text12 ,'String',' R=1');
case 3
set(handles.text10 ,'String','参考输入');
set(handles.text11 ,'String',' y_r=0.2*U(t)');
set(handles.text12 ,'String',' ');
case 4
set(handles.text10 ,'String','PID');
set(handles.text11 ,'String',' P=5,I=0.001,D=1');
set(handles.text12 ,'String',' ');
end
% --- Executes during object creation, after setting all properties.
function popupmenu1_CreateFcn(hObject, eventdata, handles)
% hObject handle to popupmenu1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: popupmenu controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
warning off
M = str2double(get(handles.edit1, 'String'));%小车质量
m = str2double(get(handles.edit2, 'String'));%摆杆质量
b = str2double(get(handles.edit3, 'String'));%小车阻尼
I = str2double(get(handles.edit4, 'String'));%摆杆转动惯量
l = str2double(get(handles.edit5, 'String'));%摆杆长度
g=9.8; %重力加速度
%%%%%%%%%%%%%%%%%%%%%%%%计算系统状态矩阵%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
A=[ 0 1 0 0;...
(M+m)*m*g*l/((M+m)*I+M*m*l^2) 0 0 m*l*b/((M+m)*I+M*m*l^2);...
0 0 0 1;...
-m^2*l^2*g/((M+m)*I+M*m*l^2) 0 0 -(I+m*l^2)*b/((M+m)*I+M*m*l^2)];
B=[0;-m*l/(((M+m)*I+M*m*l^2));0;(I+m*l^2)/((M+m)*I+M*m*l^2)];
C=[0 0 1 0;1 0 0 0];
D=zeros(2,1);
E=zeros(4,1);
%%%%%%%%%%%%%%%%%%%%将状态矩阵转存到状态空间%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
assignin('base','A',A);
assignin('base','B',B);
assignin('base','C',C);
assignin('base','D',D);
assignin('base','E',E);
%%%%%%%%%%%%%%%%%%%%%%选择倒立摆的控制方式%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
popup_sel_index = get(handles.popupmenu1, 'Value');
switch popup_sel_index
case 1 %%极点配置法
Qc=ctrb(A,B);
EA=[-10 0 0 0;...
0 -10 0 0;...
0 0 -2-2*sqrt(3)*i 0;...
0 0 0 -2+2*sqrt(3)*i];
PP=polyvalm(poly(EA),A);
Ks=[0 0 0 1]*inv(Qc)*PP; %%计算反馈矩阵
[t,x,y]=sim('jwgcqp.mdl'); %%调用降维观测器的simulink模块
axes(handles.axes1);
plot(t,y(:,1));
axes(handles.axes2);
plot(t,y(:,3));
axes(handles.axes3)
plot([-0.02;0.02],[-0.8;-0.8],'color','k','linestyle','-','linewidth',2);
axis([-0.02 0.02 -1.2 1.2]);
car1=line([-0.004;0.004],[-0.5;-0.5],'color','k','linestyle','-','erasemode','xor','linewidth',25);
car21=line(-0.004,-0.72,'color','k','linestyle','-','erasemode','xor','markersize',40);
car22=line( 0.004,-0.72,'color','k','linestyle','-','erasemode','xor','markersize',40);
pendulum1=line([0;0],[-0.3;0.6],'color','r','linestyle','-','erasemode','xor','linewidth',10);
pendulum2=line(0,-0.27,'color','g','linestyle','-','erasemode','xor','markersize',30);
for s=1:length(t)
set(car21,'xdata',-0.004+y(s,3),'ydata',-0.72);
set(car22,'xdata', 0.004+y(s,3),'ydata',-0.72);
set(car1,'xdata',[-0.004+y(s,3);0.004+y(s,3)],'ydata',[-0.5;-0.5]);
set(pendulum2,'xdata',y(s,3),'ydata',-0.27);
set(pendulum1,'xdata',[y(s,3);sin(y(s,1))+y(s,3)],'ydata',[-0.3;-0.3+cos(y(s,1))]);
drawnow;
end
case 2 %%LQR最优控制器
QQ=diag([1,0,1,0]);
RR=1;
Ks=lqr(A,B,QQ,RR); %%计算反馈矩阵
[t,x,y]=sim('jwgcql.mdl'); %%调用降维观测器的simulink模块
% figure(2)
% subplot(4,2,1)
% plot(t,y(:,1))
% title('系统状态变化')
% subplot(4,2,2)
% plot(t,y(:,5))
% title('降维观测器结果')
% subplot(4,2,3)
% plot(t,y(:,2))
% subplot(4,2,4)
% plot(t,y(:,6))
% subplot(4,2,5)
% plot(t,y(:,3))
% subplot(4,2,6)
% plot(t,y(:,7))
% subplot(4,2,7)
% plot(t,y(:,4))
% subplot(4,2,8)
% plot(t,y(:,8))
axes(handles.axes1);
plot(t,y(:,1));
axes(handles.axes2);
plot(t,y(:,3));
axes(handles.axes3);
plot([-0.3;0.3],[-0.8;-0.8],'color','k','linestyle','-','linewidth',2);
axis([-0.3 0.3 -1.2 1.2]);
car1=line([-0.06;0.06],[-0.5;-0.5],'color','k','linestyle','-','erasemode','xor','linewidth',25);
car21=line(-0.06,-0.72,'color','k','linestyle','-','erasemode','xor','markersize',40);
car22=line( 0.06,-0.72,'color','k','linestyle','-','erasemode','xor','markersize',40);
pendulum1=line([0;0],[-0.3;0.6],'color','r','linestyle','-','erasemode','xor','linewidth',10);
pendulum2=line(0,-0.27,'color','g','linestyle','-','erasemode','xor','markersize',30);
for s=1:length(t)
set(car21,'xdata',-0.06+y(s,3),'ydata',-0.72);
set(car22,'xdata', 0.06+y(s,3),'ydata',-0.72);
set(car1,'xdata',[-0.06+y(s,3);0.06+y(s,3)],'ydata',[-0.5;-0.5]);
set(pendulum2,'xdata',y(s,3),'ydata',-0.27);
set(pendulum1,'xdata',[y(s,3);sin(y(s,1))+y(s,3)],'ydata',[-0.3;-0.3+cos(y(s,1))]);
drawnow;
end
case 3
% A=[ 0 1 0 0;...
% (M+m)*m*g*l/((M+m)*I+M*m*l^2) 0 0 m*l*b/((M+m)*I+M*m*l^2);...
% 0 0 0 1;...
% -m^2*l^2*g/((M+m)*I+M*m*l^2) 0 0 -(I+m*l^2)*b/((M+m)*I+M*m*l^2)];
% B=[0;-m*l/(((M+m)*I+M*m*l^2));0;(I+m*l^2)/((M+m)*I+M*m*l^2)];
% C=[0 0 1 0;1 0 0 0];
% p=[-10,-7,-1.901,-1.9];
% Kysw=place(A,B,p);
[x,y]=sim('pedulumpid.mdl');
axes(handles.axes1);
plot(t,y(:,1));
axes(handles.axes2);
plot(t,y(:,3));
axes(handles.axes3);
plot([-0.3;0.3],[-0.8;-0.8],'color','k','linestyle','-','linewidth',2);
axis([-0.3 0.3 -1.2 1.2]);
car1=line([-0.06;0.06],[-0.5;-0.5],'color','k','linestyle','-','erasemode','xor','linewidth',25);
car21=line(-0.06,-0.72,'color','k','linestyle','-','erasemode','xor','markersize',40);
car22=line( 0.06,-0.72,'color','k','linestyle','-','erasemode','xor','markersize',40);
pendulum1=line([0;0],[-0.3;0.6],'color','r','linestyle','-','erasemode','xor','linewidth',10);
pendulum2=line(0,-0.27,'color','g','linestyle','-','erasemode','xor','markersize',30);
for s=1:length(t)
set(car21,'xdata',-0.06+y(s,3),'ydata',-0.72);
set(car22,'xdata', 0.06+y(s,3),'ydata',-0.72);
set(car1,'xdata',[-0.06+y(s,3);0.06+y(s,3)],'ydata',[-0.5;-0.5]);
set(pendulum2,'xdata',y(s,3),'ydata',-0.27);
set(pendulum1,'xdata',[y(s,3);sin(y(s,1))+y(s,3)],'ydata',[-0.3;-0.3+cos(y(s,1))]);
drawnow;
end
end
% --- Executes on button press in pushbutton4.
function pushbutton4_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
pause;
% --- Executes on button press in pushbutton5.
function pushbutton5_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
close(gcbf);
clc,clear,close all
A874.完整MATLAB
V文章来源地址https://www.toymoban.com/news/detail-478406.html
到了这里,关于基于MATLAB的一级倒立摆控制仿真,带GUI界面操作显示倒立摆动画,控制器控制输出的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!