前言
生活中最常见的线扫相机的应用就是复印机上的扫描装置。
原理

每次采集完一条线后正好运动到下一个单位长度,再继续下一条线的采集,一段时间后线条就拼成了一张二维的图片。
两种方式:
1.匀速运动,相同间隔时间取单帧。
2.编码器触发取图,等间距触发单帧取图。
产品的应用
线阵相机的典型应用领域是检测连续的材料,例如金属、塑料、纸和纤维等。被检测的物体通常匀速运动 , 利用一台或多台相机对其逐行连续扫描 , 以达到对其整个表面均匀检测。可以对其图像一行一行进行处理 , 或者对由多行组成的面阵图像进行处理。另外线阵相机非常适合测量场合,这要归功于传感器的高分辨率 , 它可以准确测量到微米。
-
线阵相机,顾名思义是呈“线”状的。虽然也是二维图像,但极长,几K的长度,而宽度却只有几个象素的而已。一般上只在两种情况下使用这种相机:一、被测视野为细长的带状,多用于滚筒上检测的问题。二、需要极大的视野或极高的精度。
-
在第二种情况下(需要极大的视野或极高的精度),就需要用激发装置多次激发相机,进行多次拍照,再将所拍下的多幅“条”形图象,合并成一张巨大的图。因此,用线阵型相机,必须用可以支持线阵型相机的采集卡。
线阵型相机价格贵,而且在大的视野或高的精度检测情况下,其检测速度也慢--一般相机的图象是
400K~1M,而合并后的图象有几个M这么大,速度自然就慢了。
优势
- 线阵CCD加上扫描机构及位置反馈环节,其成本仍然大大低于同等面积、同等分辨率的面阵CCD;
- 扫描行的坐标由光栅提供,高精度的光栅尺的示值精度可高于面阵CCD像元间距的制造精度,从这个意义上讲,线阵CCD获取的图像在扫描方向上的精度可高于面阵CCD图像;
- 最新的线阵CCD 亚像元的拼接技术可将两个CCD芯片的像元在线阵的排列长度方向上用光学的方法使之相互错位1/2个像元,相当于将第二片CCD的所有像元依次插入第一片CCD的像元间隙中,间接“减小”线阵CCD像元尺寸,提高了CCD的分辨率,缓解了由于受工艺和材料影响而很难减小CCD像元尺寸的难题,在理论上可获得比面阵CCD更高的分辨率和精度。
线阵相机如何选型
1.计算分辨率:幅宽/最小检测精度=每行需要的像素
2.选定相机:幅宽/像素数=实际检测精度
3.每秒运动速度长度/精度=每秒扫描行数
如幅宽为1800毫米、精度1毫米、运动速度25000mm/s
相机:1800/1=1800像素,最少2000像素,选定为2k相机1800/2048=0.9实际精度25000mm/0.9mm=27.8KHz应选定相机为2048像素28 KHz相机。
常用参数
图片尺寸
高度(Height)和宽度(Width)共同决定一张图的大小。
触发模式
帧触发(Frame Burst Start)
相机只有收到帧触发信号,才会开
始曝光并给出图像数据。相机按照
当前设置的行频出图,无需设置行
触发信号。
行触发(Line Start)
行频由外部行触发控制信号的频
率决定。该模式下,在一个触发信
号输入时只曝光一行。
帧+行触发
相机的外部帧触发信号、行触发信
号都是必 需的。一帧的行数由帧
高度寄存器控制,行频由外部提供
的行触发信号控制,同时受限于内
部的设定值。相机收到帧触发信号
之后,行触发信号才起作用。
自由触发模式
该模式的触发信号均由相机内部
自行产生,可以根据需求调节行频
参数。
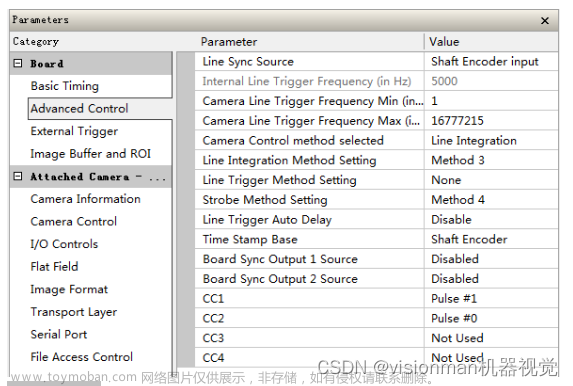
频率转换器及编码器控制
开启行触发时,当外接了编码器触发信号后,编码器的信号快慢会控制相机的实际行频,
若拍出来的图片略有压缩或拉伸时,需要使用频率转换器来进行控制。
预除器(PreDivider)输入信号最先进入到预除器模块,通过一个整数整除,达到降低
源信号频率的目的, 并将处理后的信号送到乘法器模块。预除器模块可以减少输入信号的
周期性抖动,并且频率超过 100kHz 的信号必须要经过 预除器降低频率,因为乘法器只能
接受 10~100kHz 频率范围内的信号。来自轴编码器的信号的周期性抖动可以被接受。
乘法器(Multiplier)信号被预除器处理完成后会被送到乘法器,乘法器会把信号频率
乘上一个整数,达到 增加信号频率的目的,随后信号会被送到分压器模块。调整参数可以
设置成上升沿或者下降沿。如果设置成上升沿,由预除器过来的信号的 每一个上升沿将会
被锁定去匹配上升沿产生的信号,反之亦然。要确保不要用太大的乘数去增加信号的频率,
避免触发信号频率超出相机的最大支持 行频。即使选择一个较小的乘数,过高的频率也有
可能在频率调整中产生,出现超出 相机最大行频的情况。
分频器(PostDivide) 分频器通过一个整数因子降低信号的频率,并将产生的新的频
率的信号作为相机的触发信号。
经过上述 3 个模块处理后的信号即作为相机的最终触发信号。
较常用的为乘法器和预除器,简单点描述就是:图像拉伸了就使用预除器,压缩就使用
乘法器。文章来源:https://www.toymoban.com/news/detail-478410.html
方向
对于有往返的平移台,可以使用轴编码器控制来处理。在相机输入接了两相后,轴编码
器可以选择忽视方向计数(Ignore Direction)和固定方向计数(Follow Direction)两种模
式。忽视方向计数会记录所有方向的数据;固定方向计数只会记录正向一次的数据,反复来
回的数据不予记录。文章来源地址https://www.toymoban.com/news/detail-478410.html
到了这里,关于线扫相机的使用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!