前言
前面的文章介绍了CAN协议、本文介绍一下CAN FD,对比一下这两者的区别。希望看完后,能对你有所帮助。
CAN 协议介绍的文章:CAN总线详细介绍
一、CAN FD简介
1.1 CAN FD是什么?
CAN FD,全称为CAN with Flexible Data rate。继承了CAN的主要特性,弥补了CAN的数据长度和带宽的限制。可简单认为CAN FD就是CAN的升级版。
2011年,开始CAN FD协议的开发,2012年发布第一个版本,2015年ISO11898-1进行了修订,将CAN FD加入其中。
1.2 为什么要CAN FD?
随着汽车功能越来越复杂,也越来越往智能化发展,传统的CAN总线已经跟不上时代的速度了。主要原因有如下几点:
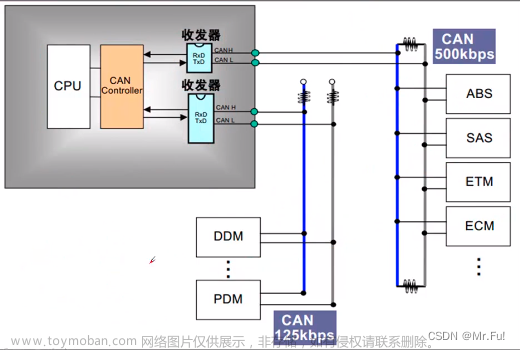
- CAN 总线最高速率为 1Mbit/s,实际使用中通常只有是 500k,随着功能的逐渐增多,各 ECU 之间的信息交互也越多,导致总线负载持续增加;
- CAN 报文中只有约 40~50%的带宽用于实际数据传输;
- 最大总线速度受到响应机制的限制,例如 CAN 控制器中的 ACK
生成延迟;收发器传播延迟;导线延迟等。
为了解决CAN总线的局限,就对其进行升级,CAN FD就此应运而生了。
1.3 CAN FD的特点
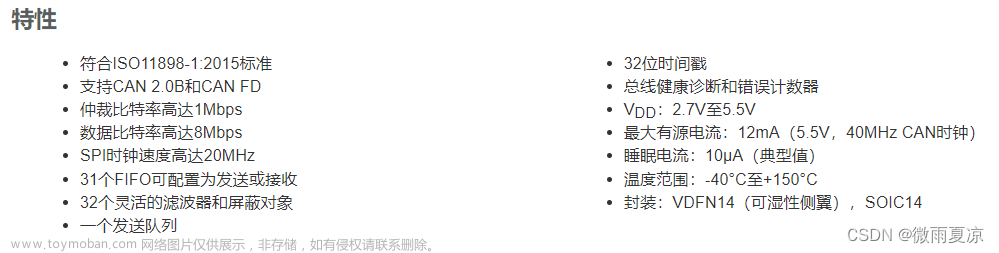
- 传输速率是可变的。从控制场中的BRS位到ACK场之前(含CRC分界符)为可变速率,最高速率可达到8Mbps。其他部分与CAN相同。
- 数据长度不同。CAN FD支持的最大数据长度为64byte。
- 帧格式不同。CanFD新增了FDF、BRS、ESI位
二、CAN FD协议
2.1 CAN FD帧结构
CAN FD数据帧结构与CAN一样,一共有:帧起始SOF,仲裁段,控制段,数据段,CRC段,ACK段,帧结束,共7个部分


2.1.1 帧起始
CAN FD与CAN使用相同的SOF标志位来标志报文的起始。帧起始由1个显性位构成,标志着报文的开始,并在总线上起着同步的作用
2.1.2 仲裁段
与传统CAN相比,CAN FD取消了远程帧,用RRS位替换了RTR位,为常显性。IDE位仍为标准帧和扩展帧标志位,若标准帧与扩展帧具有相同的前 11 位 ID,那么标准帧将会由于 IDE 位为 0,优先获得总线。
RTR(Remote Transmission Request Bit):远程发送请求位,RTR位在数据帧里必须是显性,而在远程帧里为隐性。
RRS(Remote Request Substitution):远程请求替换位,即传统CAN中的RTR位,CAN FD中为常显性。

2.1.3 控制段
控制段中CANFD与CAN有着相同的IDE,res,DLC位。同时增加了三个控制bit位,FDF、BRS、ESI。
FDF(Flexible Data Rate Format):原CAN数据帧中的保留位r。FDF常为隐性,表示CAN FD 报文。
BRS(Bit Rate Switch):位速率转换开关,当BRS为显性位时数据段的位速率与仲裁段的位速率一致,当BRS为隐性位时数据段的位速率高于仲裁段的位速率。
ESI(Error State Indicator):错误状态指示,主动错误时发送显性位,被动错误时发送隐性位。

DLC同样是4bit表示数据段的长度,对应的关系如下:

2.1.4 数据段
CAN FD不仅能支持传统的0-8字节报文,同时最大还能支持12, 16, 20, 24, 32, 48, 64字节

2.1.5 CRC段
为了避免位填充对CRC的影响,CAN FD在CRC场中增加了stuff count记录填充位的个数对应8的模,并用格雷码表示,还增加了奇偶校验位。FSB(fixed stuff-bit)固定为前一位的补码。
Stuff Count由以下两个元素组成:
格雷码计算:CRC区域之前的填充位数除以8,得到的余数(Stuff bit count modulo 8)进行格雷码计算得到的值(Bit0-2)
奇偶校验(parity):通过格雷码计算后的值的奇偶校验(偶校验)
CAN FD对CRC算法进行了改进,CRC对填充位也加入了计算。在校验和部分为避免有连续位超过6个,就确定在第一位以及以后每4位添加一个填充位加以分割,这个填充位的值是上一位的反码,作为格式检查,如果填充位不是上一位的反码,就作出错处理。
CAN的CRC的位数是15位,而在CAN FD中,CRC场扩展到了21位,如下:
当传输数据为0~8字节或更少时:CRC 15位
当传输数据为9~16字节或更少时:CRC 17位
当传输数据超过17~64个字节时:CRC 21位

2.1.6 ACK段
与CAN相比,在CAN FD中最多可接受2个位时间有效的ACK,允许1个额外的位时间来补偿收发器相移和传播延迟)
由从高速的数据场到慢速的仲裁场时,时钟切换会引起收发器相移和总线传播延迟。为了补偿其相移和延迟,相比传统的CAN,在CAN FD中多加了这额外的1位时间。
在ACK之后,发送ACK界定符。这是一个表示ACK结束的分隔符,为是1位隐性位。
2.1.7 帧结束
与CAN一样,CAN FD的帧结尾也为连续7位的隐性位文章来源:https://www.toymoban.com/news/detail-479274.html
总结:
CAN FD 兼容CAN,可以正常收发传统CAN报文,但是传统CAN不能正确收发CAN FD报文,帧格式不一致,会导致传统CAN发送错误帧。就像平常的软件版本一样,高版本向下兼容。
CAN FD能传输的数据更多,速率也更高,安全性也更高。文章来源地址https://www.toymoban.com/news/detail-479274.html
到了这里,关于CAN FD总线详细介绍的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!