目录
1.1、红外线的介绍
1.2、红外遥控器的工作原理
1.3、NEC协议的介绍
1.引导码的组成
2.地址码
3.数据码
4.反码
5.连发码
1.4、红外接受装置
1.在数码管显示红外解码遥控器的按键值:
1.1、红外线的介绍
红外是红外线的简称,它是一种电磁波人的眼睛可见光按照波从长到短排列,红,黄,绿,青,蓝,紫。比紫光短的叫紫外线,比红光长的叫红外线。红外线遥控就是利用他的波长(760nm~ 1mm)。
1.2、红外遥控器的工作原理
红外遥控有无线,非接触控制的原理。抗干扰能力强,抗干扰强,简单实现,的特点在家里的各个地方都有广泛应用例如:遥控器,空调遥控。一般有红外发射装置和红外接受设备组成,发射装置一般为红外遥控器,由键盘电路、红外编码电路、电源电路和红外发射电路(元件:红外发光二极管,特殊的发光二级管)组成。红外发光二极管特殊的二极管可发射红外线。 通常为防止信号干扰等,红外遥控器的信号通常使用的载波 方式传输二进制的编码。常用的载波频率为38千HZ,发射端常使用的晶振频率为455千HZ,对其整数的分频除12,为38k。红外遥控的载波频率和遥控的外部晶振有关。所以通常的红外遥控将脉冲信号进行二进制的编码,放到载波上传输

如上图遥控器的红外发光二极管发射脉冲信号(用了一个三极管)高电平出去低电平接受,在接受端的接受二极管解码。 二进制编码的形式我们用MEC的PWM 的脉冲宽度调制。要开发红外接受设备一定要知道红外遥控的编码方式和编码方式,才能更好解码,这里用NEC解码。
1.3、NEC协议的介绍
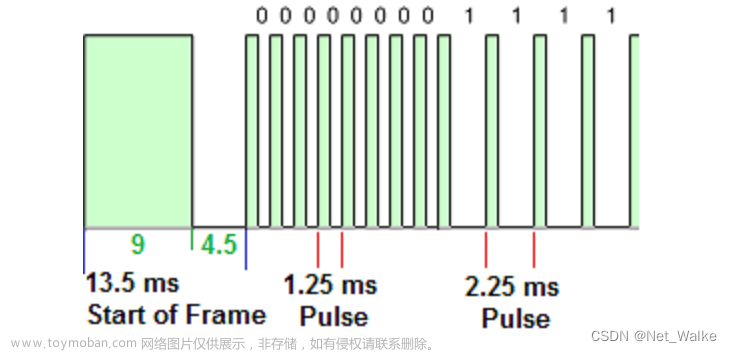
我是用的红外遥控为NEC协议的,NEC码的位定义:一个脉冲对应的是560us 的连续载波,一个逻辑 1 传输需要 2.25 ms (560us 脉冲+1680us 的低电平),一个逻辑0 的传输需要 1.125ms(560us 脉冲+ 560us低电平)。

由前文可知在接收端(上图),逻辑1是560us 的低电平和1680us 的高电平,逻辑0 是560us的低电平和560us 的高电平。正好和发射端相反。

这就是一帧数据 。
NEC协议是红外通信的协议之一, 单次发送由引导码+地址码+地址码反码+数据码+数据码反码+结束码6部分组成.8位码:(地址码,地址反码,控制码,控制反码)反码是检验正确性,取反。
1.引导码的组成
引导码由9ms的低电平和4.5ms的空闲(即高电平)组成.
如果我们规定一拍是562.5us, 那么引导码就是16拍的红外发射+8拍的空闲.
2.地址码
感觉可以理解成品牌码, 比如海信电视遥控器的地址码是1, 长虹电视遥控器的地址码是2这样(瞎编的). 一个遥控器的地址码是固定的.
3.数据码
是遥控器上的按键对应的码, 每一个按键对应一个数据码, 接收端根据数据码来判断接收的按键是哪个.
4.反码
是校验用的, 保证数据传输准确. 实际编程解码时也可以不校验.
5.连发码
由9ms(0)+2.5ms(1)+0.56ms(1)+97.96ms(1),对遥控器连续操作一个按键长时间(一帧数据发送后)不松开就发送连发码。
1.4、红外接受装置
红外接受装置是由红外接受电路,红外解码、电源和应用电路组成。主要作用是将红外发射装置发过来的红外线转换成电信号,再经过放大,限幅,检波,和整型形成遥控指令脉冲传输到微控制器当中,市场大多使用成品的红外接收头。铁皮和塑料封装都是一体化,(红外接受电路,红外解码、电源和应用电路组成。)都已经封装到里面直接用。 共有三个引脚vot(传出解码数据),GND,VCC。没有脉冲时高电平。接受后判断高电平时间(由上文可知),时间的不同来判断高低电平。
1.在数码管显示红外解码遥控器的按键值:
主要显示控制码:文章来源:https://www.toymoban.com/news/detail-479519.html
解码:没接受到前高电平,接收后为低电平通过外部中断下降沿一到判断是否为9ms,然后判断书否有4.5ms,然后接收32位码,从第三个字节显示。文章来源地址https://www.toymoban.com/news/detail-479519.html
#include "reg52.h"
#include "smg.h"//数码管头文件
#include "dlay.h"
void ired_init(void);
u8 gired_data[];//红外接受的数据
sbit IRED=P3^2;//定义管脚
void main()
{
u8 ired_buf[3];//存储按键值16进制
ired_init();/初始化
while(1)
{
ired_buf[0]=gsmg_data[gired_data[2]/16];//高位转换成段码数据
ired_buf[1]=gsmg_data[gired_data[2]%16];//低位
ired_buf[2]=0x76;
smg_display(ired_buf,6);送入数码管,调用
}
}
void ired_init(void)//配置为下降沿触发
{
ITO=1;//判断下降沿
EX0=1;//打开定时器中断0
EA=1;
IRED=1;//付初始值
}
void ired() interrupt 0//中断配置
{
u16 time_cnt=0;
u8 ired_high_time=0;//高电平的时间
u8 i=0,j=0;
if(IRED==0)//判断是不是低电平
{
time_cnt=1000;
while((!IRED)&&(time_cnt))//判断是不是9.5ms低电平
{
delay_10us(1);//判断是不是引导信号
time_cnt--;
if(time_cnt==0)return;//不再操作
}
if(IRED==1)
{
time_cnt=500;
while(IRED&&time_cnt)//判断4.5高电平
{
delay_10us(1);
time_cnt--;
if(time_cnt==0) return;
}
//四个字节的读取
for(i=0,i<4,i++)//接受哪一个字节
{
for(j=0,j<8,j++)//根据高电平的时间判断01
{
time_cnt=600;//560us
while(IDRE==0&&time_cnt)
{
delay_10us(1);
time_cnt--;
if(time_cnt==0) return;
}
time_cnt=20;
while(IDRE)
{
delay_10us(10);//100微秒一次
ired_high_time++;
if(time_cnt>20) return;
}
gired_data[i]>>=1;//右移
if(time_cnt>=8) //高电平1的判断560us+560us,并存入;
gired_data[i]|=0x80;//每一次接受存入,红外接受先读低位再
ired_high_time =0;//读高位符合输入1,不符合输入0
}
}
}
if(gired_data[2]!=~gired_data[3])//控制码不等于控制反码
{
for(i=0;i<4;i++)
{gired_data[i]=0;}
return;
}
}
}
到了这里,关于一、红外遥控介绍(NEC协议)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!