1.BackGround
已知:换道初始纵坐标y0(横向距离),换道初始航向角tan0,换道时间t,换道结束纵坐标yf,换道结束航向角tanf,车速VehSpd,曲线中点曲率q且曲率变化率为0。求解期望的规划曲线。
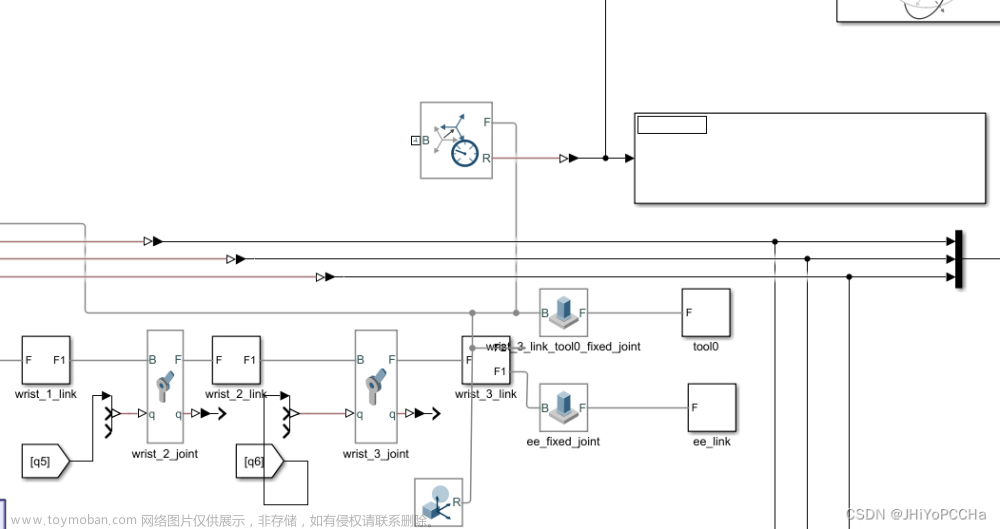
2.Algorithm


3.Reference
- 自动驾驶——ADAS车道线方程推导
- 基于多项式采样的换道路径规划
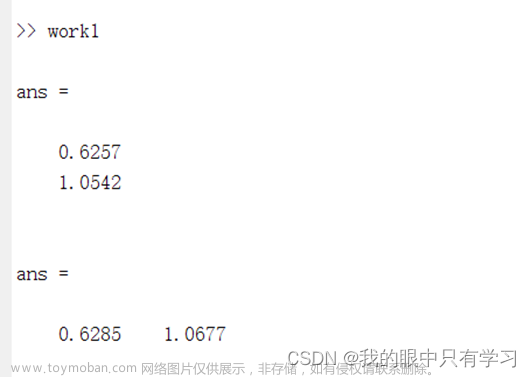
============20230609对上述引入目标函数,使用QP优化文章来源:https://www.toymoban.com/news/detail-479871.html
附:
对上述的使用QP二次规划对生成曲线优化,
考虑使用目标函数如下文章来源地址https://www.toymoban.com/news/detail-479871.html
到了这里,关于自动驾驶——基于五次多项式螺旋线方程的换道曲线规划的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!