PWM占空比
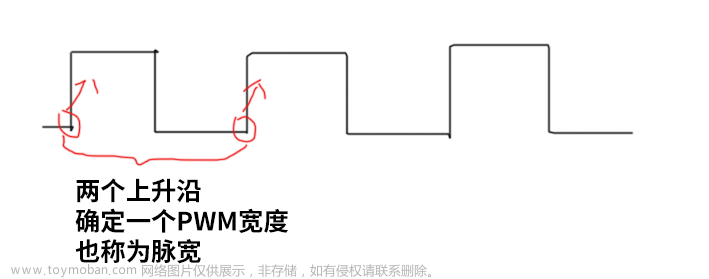
先看PWM波是怎样通过调节占空比实现对输出幅度调控的,如图所示,PWM波占空比为
D
=
T
p
T
D=\frac{T_p}{T}
D=TTp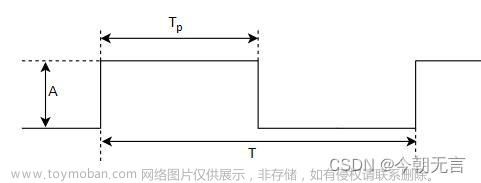
PWM波经过低通滤波后,高频分量被滤除,仅保留了直流分量,根据信号系统知识,直流分量为
a
0
=
1
T
∫
T
s
(
t
)
d
t
a_0=\frac{1}{T}\int_{T}s(t)dt
a0=T1∫Ts(t)dt
如果我们对上式进行适当变形:
a
0
T
=
∫
T
s
(
t
)
d
t
a_0T=\int_{T}s(t)dt
a0T=∫Ts(t)dt
此即所谓的“面积等效原理”,对于PWM波而言,可知直流分量大小即信号幅度与占空比的乘积:
a
0
=
A
×
D
a_0=A\times D
a0=A×D
因此通过调整PWM波的占空比即可获得所需幅度的直流输出。
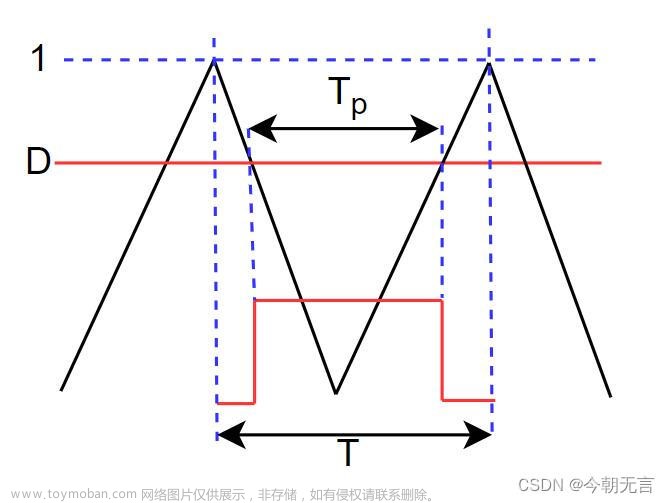
PWM波通常通过三角波比较产生:对于[0,1]间的三角波,与大小为D的信号相比较,产生的信号即为占空比为D的PWM波(根据三角形相似很容易得到),如下图所示, T p / T = D T_p/T=D Tp/T=D
SPWM调制
对于SPWM波,由于载波频率远高于调制波频率,因此在短暂的一段时间内,可以视作被比较信号大小不变,如下图,根据前文所述,在这一短暂的时间内,其滤波输出信号的幅度将近似为 a 0 = A × D a_0=A\times D a0=A×D
随着比较信号的呈正弦形式逐渐变化,滤波输出也将呈现正弦形式。
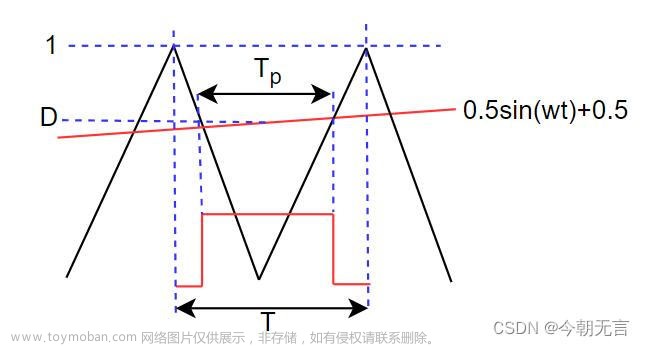
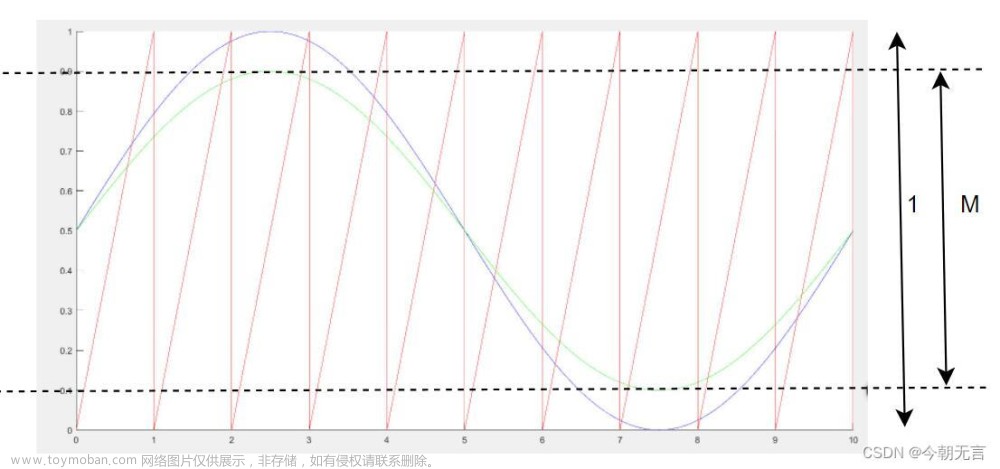
下面针对SPWM波的调制度进行介绍与分析,如下图所示,当正弦比较信号的幅值与三角信号幅值相同时,此时输出的SPWM波可以达到的最大占空比为100%,最小占空比为0%。将正弦信号幅度缩减到M倍,该放缩倍数M即称为调制度。图中所示的正弦波被平移成了两端对称的形式,此时SPWM波最大占空比为 0.5 + M / 2 0.5+M/2 0.5+M/2,最小占空比为 0.5 − M / 2 0.5-M/2 0.5−M/2。
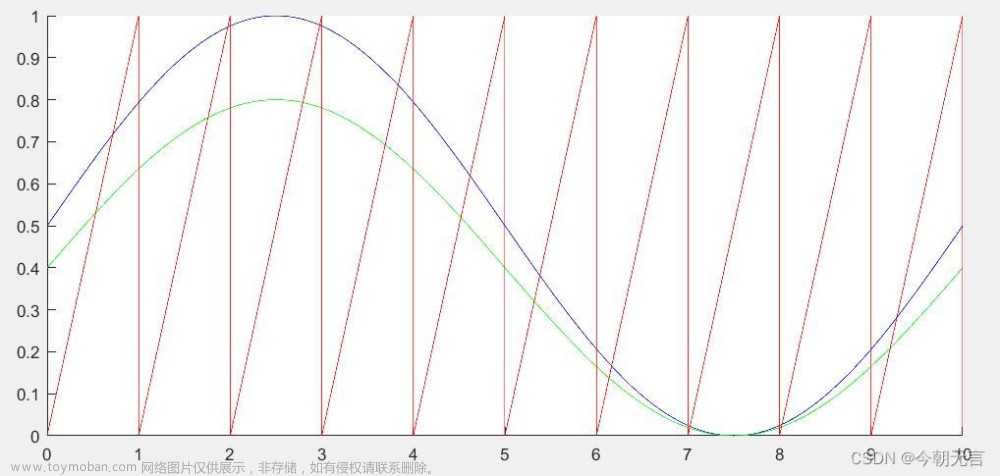
其实即使不进行平移,直接将正弦信号缩小到M倍,如下图,其SPWM波的最大占空比为M,最小占空比为0,滤波输出的峰峰值仍然为M,与上图所示仅仅相差一个直流偏置,对于正弦逆变,我们往往并不会关心其直流偏置有多少,若非要滤除直流,直接添加隔直电容即可。
 文章来源:https://www.toymoban.com/news/detail-481747.html
文章来源:https://www.toymoban.com/news/detail-481747.html
不过一般而言还是会将正弦比较信号平移到中心对称,因为死区的缘故,输出的两路PWM并非完全互补的,若比较信号的值接近0或1,会造成输出正弦波信号顶部的失真。文章来源地址https://www.toymoban.com/news/detail-481747.html
到了这里,关于SPWM波调制度原理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!