目录
一、GPIO简介
1.1 GPIO的输入输出模式
1.1.1 输入模式
1.1.2 输出模式
二、GPIO的使用
2.1 引脚初始化
2.2 引脚使用
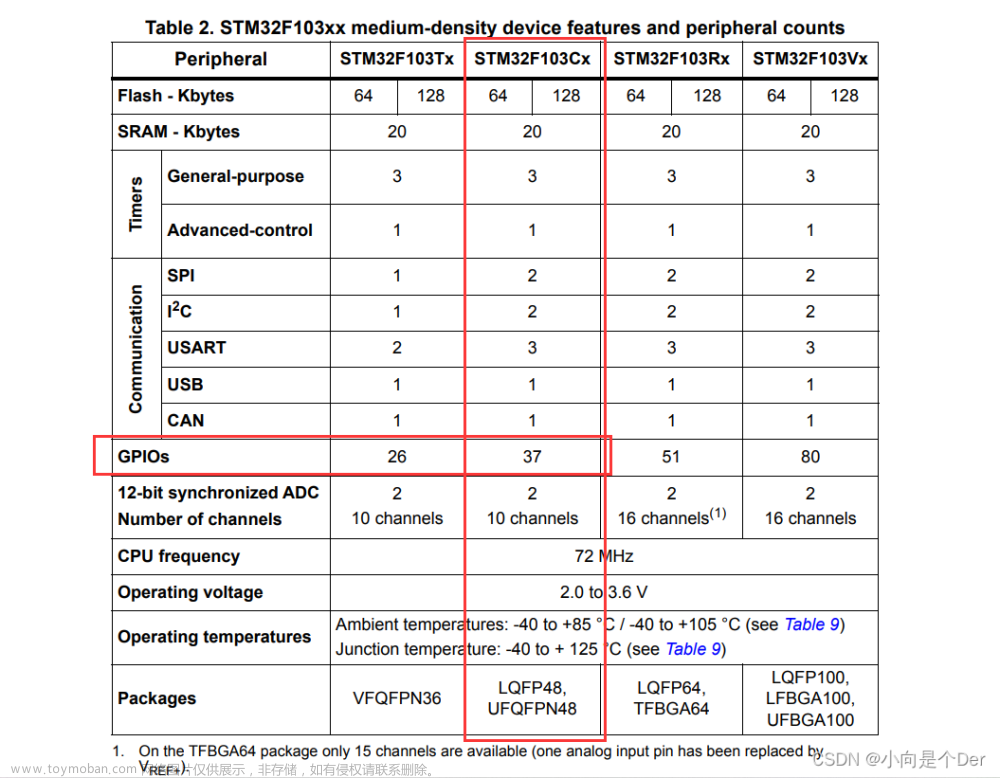
注:型号:STM32F407ZET6
一、GPIO简介
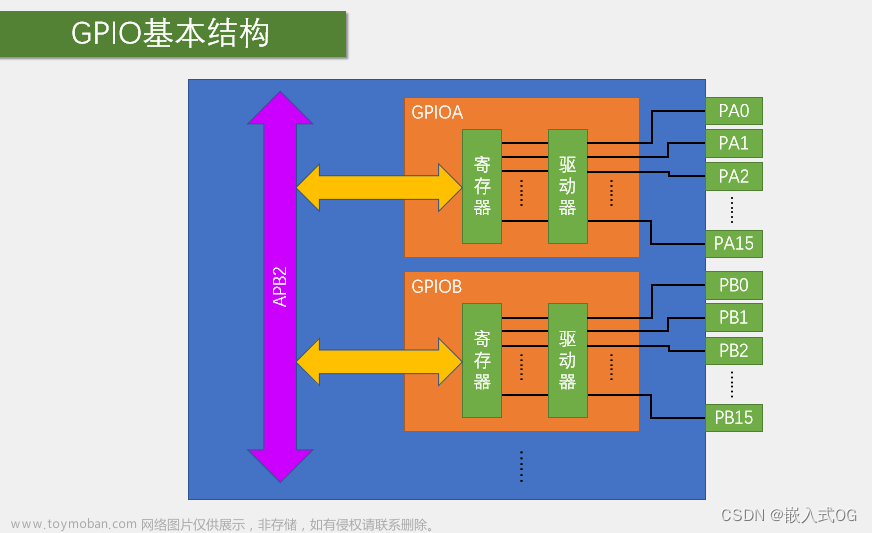
GPIO:通用输入输出接口
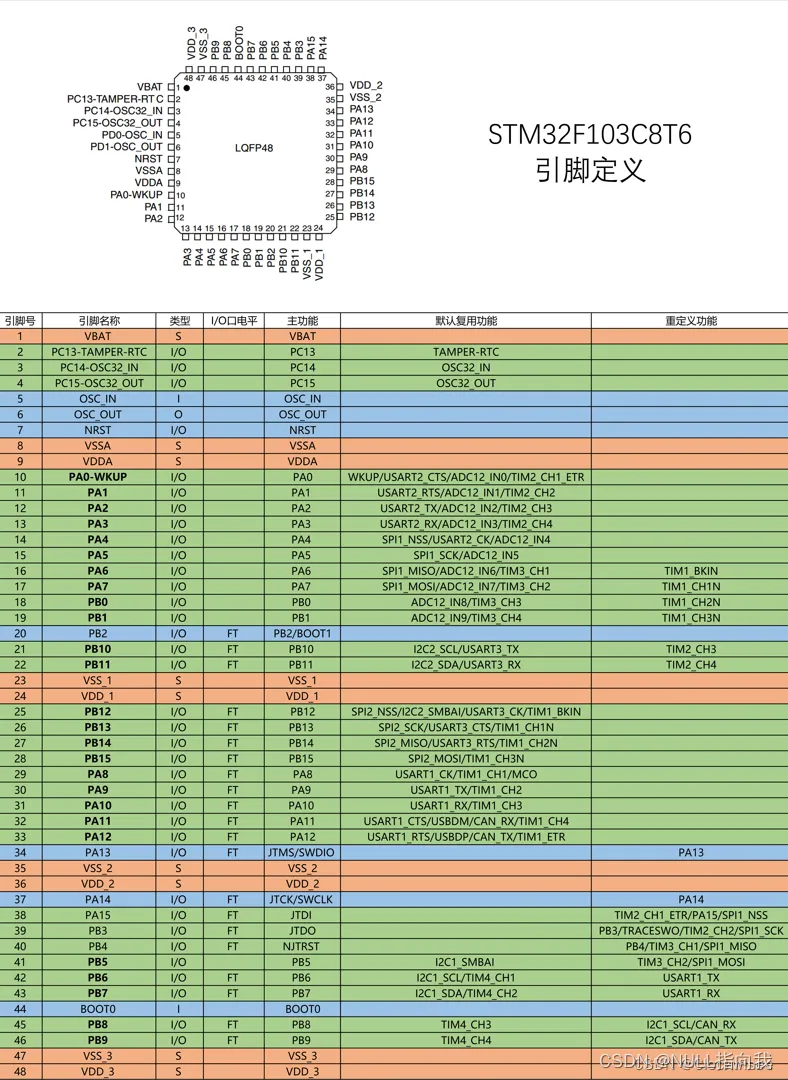
STM32上有A~H共8组,其中A~G7组每组有0~15号共16个引脚,H组有两个引脚。
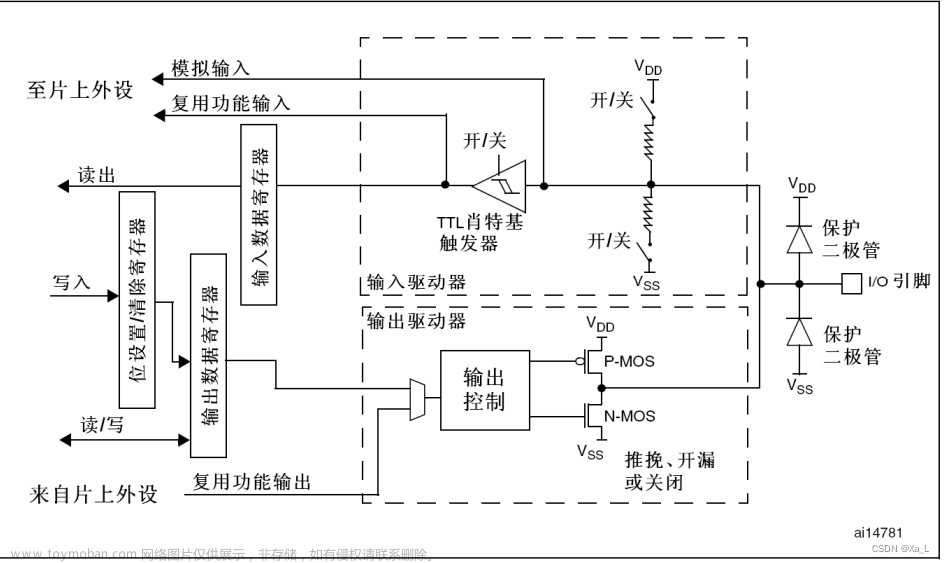
1.1 GPIO的输入输出模式
1.1.1 输入模式
1. 上拉输入
上拉电阻:信号线通过电阻连接高电平,信号的初始值是高电平。

2. 下拉输入
下拉电阻:信号线通过电阻连接低电平,信号的初始值为低电平。

3. 浮空输入
浮空:信号线不连接高低电平,信号电压不确定。
5. 模拟输入
1.1.2 输出模式
1. 开漏输出(上拉或下拉)
2. 复用开漏输出(上拉或下拉)
3. 推挽输出(上拉或下拉)
4. 复用推挽输出(上拉或下拉)
二、GPIO的使用
2.1 引脚初始化
初始化步骤:
1. 初始化一个GPIO配置结构体
头文件(定义位置):#include "stm32f4xx_gpio.h"

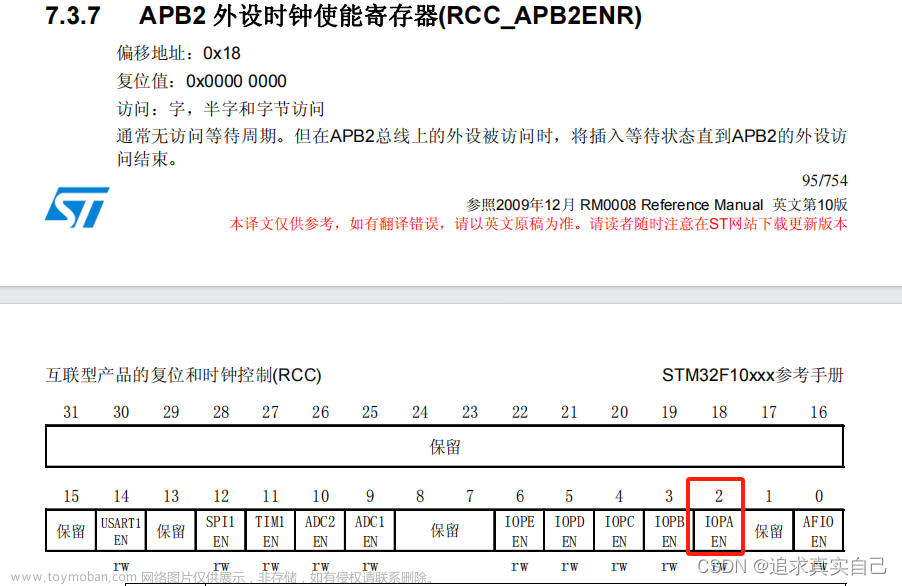
2. 使能时钟总线

头文件:#include "stm32f4xx_rcc.h"
原型:void RCC_AHB1PeriphClockCmd(uint32_t RCC_AHB1Periph, FunctionalState NewState);
参数:
- RCC_AHB1Periph 外围设备,可选项在定义的注释中
- NewState 时钟新状态,ENABLE、DISABLE
3. 配置这个GPIO配置结构体
- GPIO_Pin 初始化的引脚号
可选项:GPIO_Pin_0~GPIO_Pin_15,GPIO_Pin_All
- GPIO_Mode 输入输出模式
- GPIO_Mode_IN 输入模式
- GPIO_Mode_OUT 输出模式
- GPIO_Mode_AF 复用模式
- GPIO_Mode_AN 模拟模式
- GPIO_Speed 工作速度(速度越快,功耗越高)
- GPIO_Low_Speed 低速,2MHz
- GPIO_Medium_Speed 中速,25MHz
- GPIO_Fast_Speed 快速,50MHz
- GPIO_High_Speed 高速,100MHz
- GPIO_OType 输出模式
- GPIO_OType_PP 推挽输出
- GPIO_OType_OD 开漏输出
- GPIO_PuPd
- GPIO_PuPd_NOPULL 浮空
- GPIO_PuPd_UP 上拉
- GPIO_PuPd_DOWN 下拉
4. 调用初始化函数完场初始化
头文件:#include "stm32f4xx_gpio.h"
原型:void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
参数:
- GPIOx 引脚所在组,GPIOA~GPIOG
- GPIO_InitStruct 配置结构体的指针
示例代码:文章来源:https://www.toymoban.com/news/detail-482499.html
//按键初始化
void Init_Key(void)
{
//初始化配置结构体
GPIO_InitTypeDef Init_Struct_KEY0;
//使能时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
//结构体配置
Init_Struct_KEY0.GPIO_Mode = GPIO_Mode_IN;
Init_Struct_KEY0.GPIO_Pin = GPIO_Pin_0;
Init_Struct_KEY0.GPIO_PuPd = GPIO_PuPd_UP;
Init_Struct_KEY0.GPIO_Speed = GPIO_High_Speed;
//调用函数完成初始化
GPIO_Init(GPIOA,&Init_Struct_KEY0);
}
//LED灯初始化
void Tiit_LED(void)
{
//初始化配置结构体
GPIO_InitTypeDef Init_Struct_LED0_1;
//使能时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF,ENABLE);
//结构体配置
Init_Struct_LED0_1.GPIO_Mode = GPIO_Mode_OUT; //输出模式
Init_Struct_LED0_1.GPIO_Pin = GPIO_Pin_9; //9号引脚
Init_Struct_LED0_1.GPIO_OType = GPIO_OType_PP; //推挽输出
Init_Struct_LED0_1.GPIO_PuPd = GPIO_PuPd_NOPULL; //浮空
Init_Struct_LED0_1.GPIO_Speed = GPIO_High_Speed; //高速
//调用函数完成初始化
GPIO_Init(GPIOF,&Init_Struct_LED0_1);
//关灯
GPIO_SetBits(GPIOF,GPIO_Pin_9);
} 2.2 引脚使用
头文件:#include "stm32f4xx_gpio.h"
读引脚状态:
读一个引脚:uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
读一组引脚:uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
设置引脚状态:
置位:void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
复位:void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);文章来源地址https://www.toymoban.com/news/detail-482499.html
到了这里,关于STM32:GPIO配置和使用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!