TIA博途中S7-1200进行MODBUS TCP通信(作为服务器)的具体方法演示


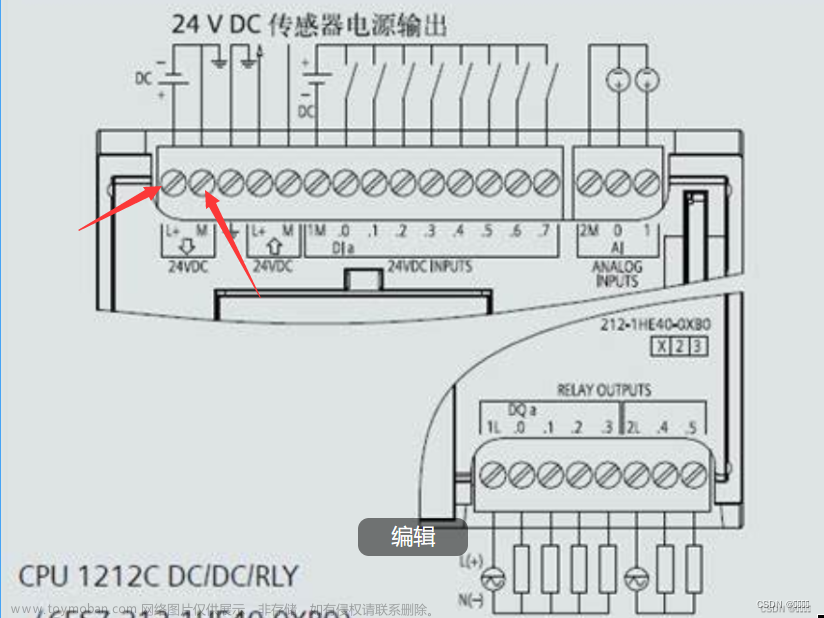
如下图所示,打开TIA博途软件,添加一个1200的PLC,并设置该PLC的IP地址,这里以192.168.0.2为例进行说明,
如下图所示,打开OB1,在通信指令—其他中找到MB_SERVER,并拖拽到OB1中,
MB_SERVER指令的具体使用方法可参考以下内容(管脚的功能定义): 文章来源:https://www.toymoban.com/news/detail-482570.html
文章来源:https://www.toymoban.com/news/detail-482570.html
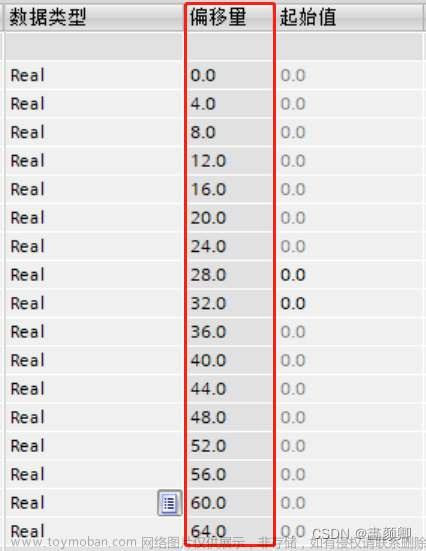
如下图所示,添加一个DB块用于测试,在DB块中添加一个变量PARA,变量的类型为TCON_IP_v4(手动输入),输入后展开即可看到具体的结构体内容,文章来源地址https://www.toymoban.com/news/detail-482570.html
到了这里,关于TIA博途中S7-1200进行MODBUS TCP通信(作为服务器)的具体方法演示的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!




![OPC UA 开源库编译方法及通过OPC UA连接西门S7-1200 PLC通信并进行数据交换[一]](https://imgs.yssmx.com/Uploads/2024/02/794752-1.png)