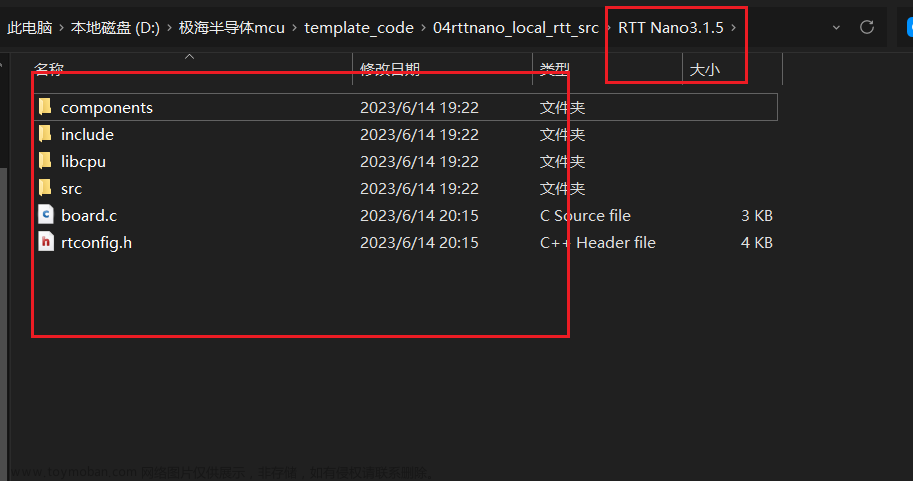
6.将rtt nano的源码放置在工程本地目录
1.复制源码到本地
复制内容有bsp任意板子的rtconfig.h board.c 文件到 rtt nano目录,复制组件文件夹,头文件夹,源码文件夹,平台先关的libcpu文件夹
2.在mdk中添加分组
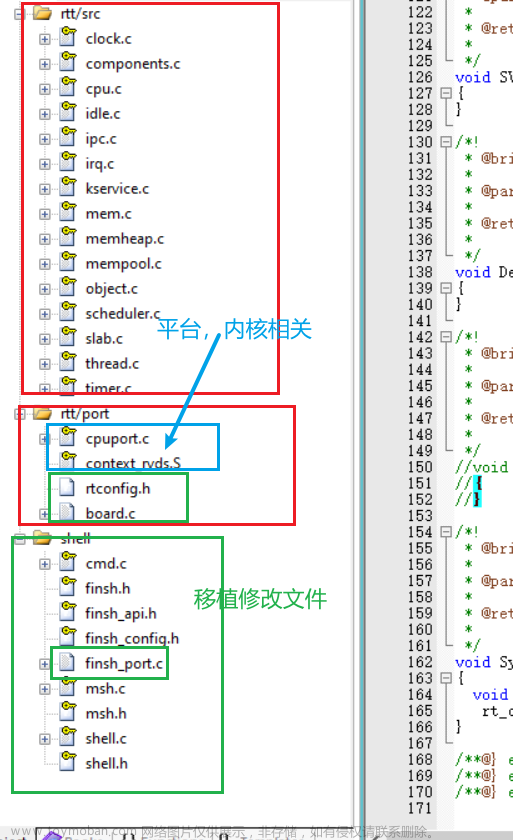
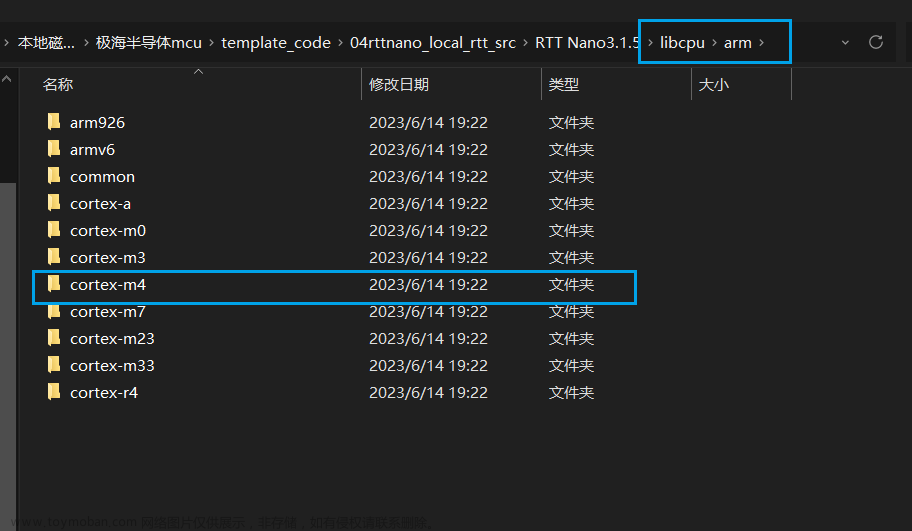
极海的这个mcu是M4的平台,的context_rvds 和 cpuport.c
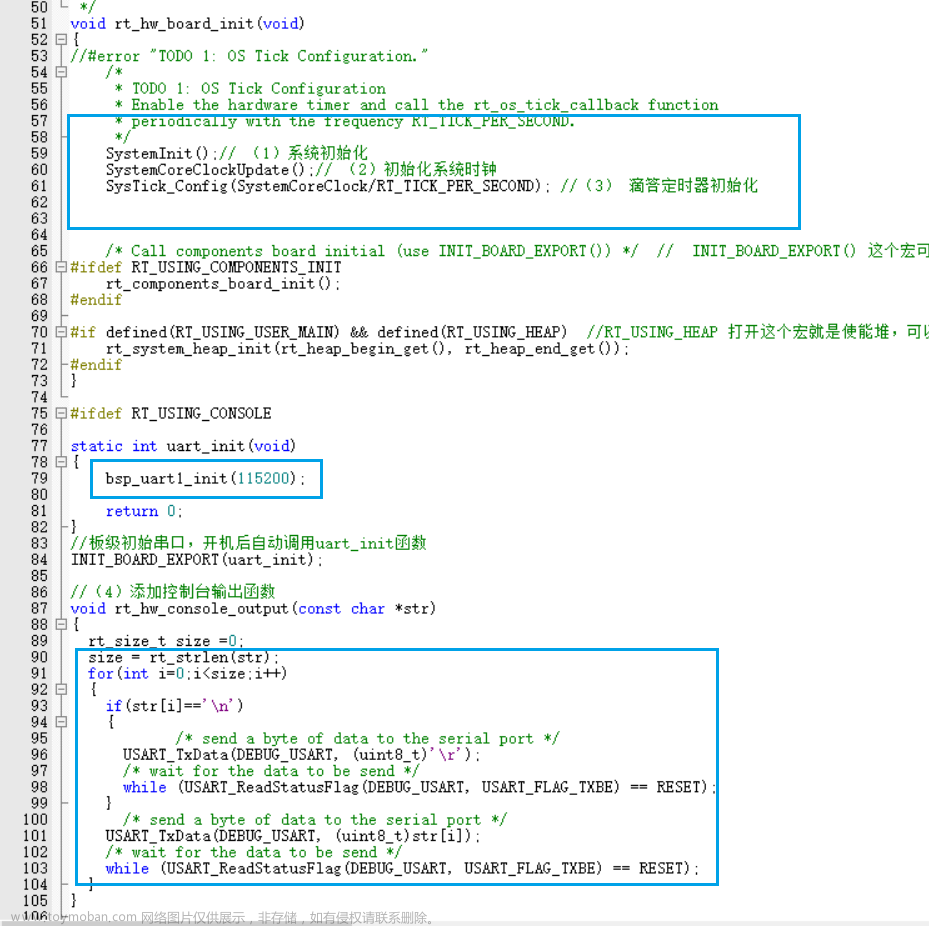
3.修改board.c 的文件
修改地方
/*
* Copyright (c) 2006-2019, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-05-24 the first version
*/
#include <rthw.h>
#include <rtthread.h>
//添加头文件
#include "apm32f4xx.h"
#include "bsp_usart.h"
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
/*
* Please modify RT_HEAP_SIZE if you enable RT_USING_HEAP
* the RT_HEAP_SIZE max value = (sram size - ZI size), 1024 means 1024 bytes
*/
// 这里是堆得大小
#define RT_HEAP_SIZE (15*1024)
static rt_uint8_t rt_heap[RT_HEAP_SIZE];
//获取堆得首地址
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
//获取堆得结束地址
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
#endif
void rt_os_tick_callback(void)
{
rt_interrupt_enter();
rt_tick_increase();//系统滴答自动增加
rt_interrupt_leave();
}
/**
* This function will initial your board.
*/
void rt_hw_board_init(void)
{
//#error "TODO 1: OS Tick Configuration."
/*
* TODO 1: OS Tick Configuration
* Enable the hardware timer and call the rt_os_tick_callback function
* periodically with the frequency RT_TICK_PER_SECOND.
*/
SystemInit();// (1)系统初始化
SystemCoreClockUpdate();// (2)初始化系统时钟
SysTick_Config(SystemCoreClock/RT_TICK_PER_SECOND); //(3) 滴答定时器初始化
/* Call components board initial (use INIT_BOARD_EXPORT()) */ // INIT_BOARD_EXPORT() 这个宏可以初始化板级外设,如串口,IIC等
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP) //RT_USING_HEAP 打开这个宏就是使能堆,可以动态创建对象
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}
#ifdef RT_USING_CONSOLE
static int uart_init(void)
{
bsp_uart1_init(115200);
return 0;
}
//板级初始串口,开机后自动调用uart_init函数
INIT_BOARD_EXPORT(uart_init);
//(4)添加控制台输出函数
void rt_hw_console_output(const char *str)
{
rt_size_t size =0;
size = rt_strlen(str);
for(int i=0;i<size;i++)
{
if(str[i]=='\n')
{
/* send a byte of data to the serial port */
USART_TxData(DEBUG_USART, (uint8_t)'\r');
/* wait for the data to be send */
while (USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_TXBE) == RESET);
}
/* send a byte of data to the serial port */
USART_TxData(DEBUG_USART, (uint8_t)str[i]);
/* wait for the data to be send */
while (USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_TXBE) == RESET);
}
}
#endif
4.注释rttconfig.h 文件
这里没有改,添加了注释文章来源:https://www.toymoban.com/news/detail-482678.html
/* RT-Thread config file */
#ifndef __RTTHREAD_CFG_H__
#define __RTTHREAD_CFG_H__
// <<< Use Configuration Wizard in Context Menu >>>
// RT_THREAD_PRIORITY_MAX 这个宏表示 RT-Thread 支持多少个优先级,取值范围为 8~256,默认为 32。
#define RT_THREAD_PRIORITY_MAX 32
//RT_TICK_PER_SECOND 表示操作系统每秒钟有多少个 tick,tick 即是操作系统的时钟周期,默认为 1000
#define RT_TICK_PER_SECOND 1000
// 表示 CPU 处理的数据需要多少个字节对齐,默认为 4 个字节
#define RT_ALIGN_SIZE 4
// 内核对象名字的最大长度,取值范围为 2~16,默认为 8。
#define RT_NAME_MAX 8
// 使用 RT-Thread 组件初始化,默认使能
#define RT_USING_COMPONENTS_INIT
// 使用用户 main 函数,默认打开
#define RT_USING_USER_MAIN
// main 线程栈大小,取值范围为 1~4086,单位为字节,默认为512。
#define RT_MAIN_THREAD_STACK_SIZE 256
// </h>
// 调试配置
// <c1>enable kernel debug configuration
// <i>Default: enable kernel debug configuration
//#define RT_DEBUG
// </c>
// <o>enable components initialization debug configuration<0-1>
// <i>Default: 0
#define RT_DEBUG_INIT 0
// <c1>thread stack over flow detect
// <i> Diable Thread stack over flow detect
//#define RT_USING_OVERFLOW_CHECK
// </c>
// </h>
// 钩子函数配置,目前全部关闭。
// <c1>using hook
// <i>using hook
//#define RT_USING_HOOK
// </c>
// <c1>using idle hook
// <i>using idle hook
//#define RT_USING_IDLE_HOOK
// </c>
// </h>
// 软件定时器配置,目前关闭,不使用软件定时器。
#define RT_USING_TIMER_SOFT 0
#if RT_USING_TIMER_SOFT == 0
#undef RT_USING_TIMER_SOFT
#endif
// <o>The priority level of timer thread <0-31>
// <i>Default: 4
#define RT_TIMER_THREAD_PRIO 4
// <o>The stack size of timer thread <0-8192>
// <i>Default: 512
#define RT_TIMER_THREAD_STACK_SIZE 512
// </e>
// 内部通信配置,包括信号量、互斥量、事件、邮箱和消息队列,根据需要配置
#define RT_USING_SEMAPHORE
// 互斥量
//#define RT_USING_MUTEX
// 事件
//#define RT_USING_EVENT
// 邮箱
#define RT_USING_MAILBOX
// 消息队列
//#define RT_USING_MESSAGEQUEUE
// </c>
// </h>
//内存管理配置。
// 这个宏用于表示是否使用内存池,目前关闭,不使用内存池。
//#define RT_USING_MEMPOOL
// 于表示是否堆,目前关闭,不使用堆
/*
通过使能或者失能 RT_USING_HEAP 这个宏来选择
使用静态或者动态内存。无论是使用静态还是动态内存方案,使用的都是内部的 SRAM,
区别是使用的内存是在程序编译的时候分配还是在运行的时候分配。
*/
#define RT_USING_HEAP
#define RT_USING_SMALL_MEM
// </c>
// <c1>using tiny size of memory
// <i>using tiny size of memory
//#define RT_USING_TINY_SIZE
// </c>
// </h>
// 控制台配置。控制台即是 rt_kprintf()函数调试输出的设备,通常使用串口
#define RT_USING_CONSOLE
//控制台缓存大小
#define RT_CONSOLEBUF_SIZE 256
// </h>
//FINSH shell 配置
#include "finsh_config.h"
// </c>
// </h>
// <h>Device Configuration
// <c1>using device framework
// <i>using device framework
//#define RT_USING_DEVICE
// </c>
// </h>
// <<< end of configuration section >>>
#endif
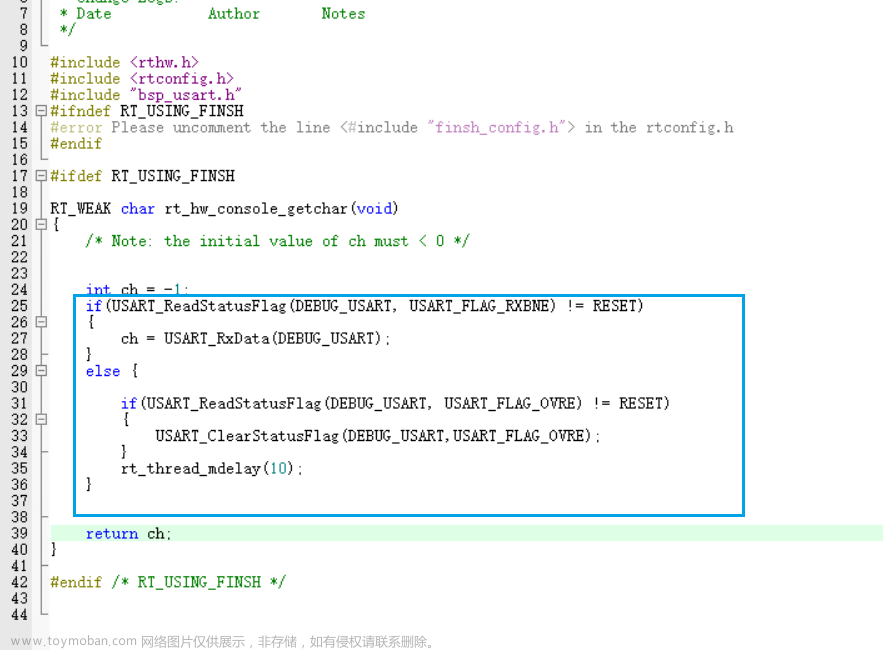
5.修改 finsh_port.c–添加串口数据获取
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
*/
#include <rthw.h>
#include <rtconfig.h>
#include "bsp_usart.h"
#ifndef RT_USING_FINSH
#error Please uncomment the line <#include "finsh_config.h"> in the rtconfig.h
#endif
#ifdef RT_USING_FINSH
RT_WEAK char rt_hw_console_getchar(void)
{
/* Note: the initial value of ch must < 0 */
int ch = -1;
if(USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_RXBNE) != RESET)
{
ch = USART_RxData(DEBUG_USART);
}
else {
if(USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_OVRE) != RESET)
{
USART_ClearStatusFlag(DEBUG_USART,USART_FLAG_OVRE);
}
rt_thread_mdelay(10);
}
return ch;
}
#endif /* RT_USING_FINSH */
 文章来源地址https://www.toymoban.com/news/detail-482678.html
文章来源地址https://www.toymoban.com/news/detail-482678.html
6.测试函数
static rt_thread_t tid1 = RT_NULL;
/* 线程 1 的入口函数 */
static void thread1_entry(void *parameter)
{
rt_uint32_t count = 0;
while (1)
{
/* 线程 1 采用低优先级运行,一直打印计数值 */
// rt_kprintf("thread1 count: %d\n", count ++);
led_toggle(LED1);
rt_thread_delay(1000);
// led_toggle(LED0);
}
}
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
int main(void)
{
led_init(LED0);
led_init(LED1);
/* 创建线程 1,名称是 thread1,入口是 thread1_entry*/
tid1 = rt_thread_create("thread1",
thread1_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
/* 如果获得线程控制块,启动这个线程 */
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
init_key_btn();
while (1)
{
rt_thread_mdelay(500);
led_toggle(LED0);
// rt_kprintf("hello\n") ;
key_lib_buttons_process();
}
}
到了这里,关于【极海APM32F4xx Tiny】学习笔记06-移植 RTT NANO工程,源码放在自己工程下的移植的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![[GD32F4]基于GD32固件库移植cherryusb[STM32F4]](https://imgs.yssmx.com/Uploads/2024/02/736610-1.png)