介绍
激光雷达在感知、定位方面发挥着重要作用。跟摄像头一样,激光雷达也是需要进行内外参数标定的。内参标定是指内部激光发射器坐标系与雷达自身坐标系的转换关系,在出厂之前就已经完成了标定,可以直接使用。自动驾驶系统需要进行的是外参的标定,即激光雷达自身坐标系与车体坐标系的关系。
激光雷达与车体为刚性连接,两者间的相对姿态和位置固定不变。为了建立激光雷达之间以及激光雷达与车辆之间的相对坐标关系,需要对激光雷达的安装进行标定,并使激光雷达数据从激光雷达坐标系转换至车体坐标系上。以Velodyne VLP-16激光雷达为例,该雷达以正上方未Z轴,电缆线接口方向为Y轴的负方向,通过右手法则来确定X轴方向。如下图所示。
车体坐标系以车辆后轴中心为坐标原点,垂直地面向上为z轴,朝前为x轴,按照右手坐标系,确定坐标系的y轴方向。两个三维空间的坐标系之间的转换关系可以用旋转矩阵家平移矩阵来表示。如图所示。
P点在Oxyz坐标系的坐标为P(x,y,z),在Ox‘y’z‘坐标系下的坐标为P’(x‘,y’,z‘)。此时P点与P’的转换关系可表示为:
如果知道了α,β,γ三个角度以及x,y,z方向上的平移量,就可以求得两个坐标系的旋转、平移矩阵,实现坐标转换。进一步推导坐标转换方程,可以得到:
假设H等于上式中的转化矩阵,那么标定的目标可以看成获取矩阵H中的6个参数。在自动驾驶汽车上,通常需要将激光雷达与惯性导航IMU坐标系进行标定,来建立激光雷达与车体坐标系之间的关系。激光雷达与车体之间的外参式感知系统建立环境模型的重要参数之一,不准确的外参会对感知系统及规划和决策系统产生负面的影响。
激光雷达与激光雷达之间的外参标定
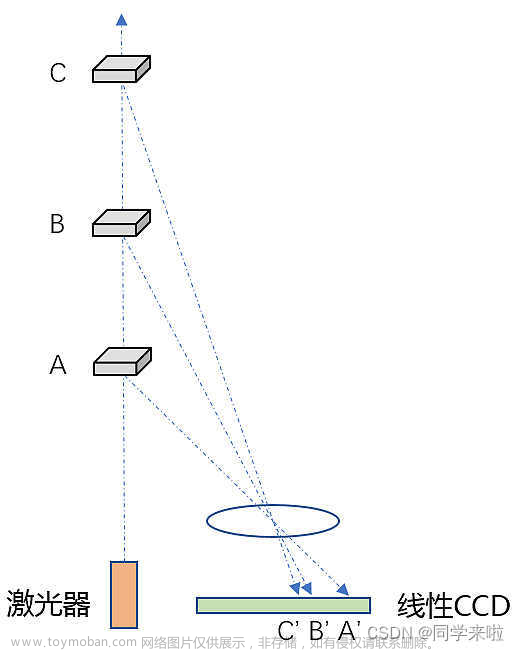
在自动驾驶的车辆上,有时会存在多个激光雷达的情况,每一个激光雷达获取的外部环境都必须准确地映射到车体坐标系下。因此,在多个激光雷达地情况下,需要对多个激光雷达地相对位置进行标定和校准。激光雷达之间的外参标定存在多种思路,其中较为常见的是通过不同激光雷达与车体之间的坐标转换关系来间接推导出激光雷达之间的坐标转换关系。这里介绍一种应用在移动车辆平台上的自动在线的过激光雷达标定方法。该方法设定一条标定路线上,让车辆沿着这条线行驶,进行自标定。在标定路上的垂直杆上贴上反光带作为特征点,以这些特征点建立外参的约束条件进行标定。
设在标定路线上有Nt个路标,车上共有Nl个激光雷达。设激光雷达Li扫描到一个特征带你Xj,Li,根据坐标转换,在时刻t,其在空间中的真实坐标为:
上式中, 可以通过IMU测量出来,因此上式中未知量仅有
可以通过IMU测量出来,因此上式中未知量仅有 。当我们能过够得到特征点在空间中的位置估计时,可以直接利用最小二乘法来求解参数:
。当我们能过够得到特征点在空间中的位置估计时,可以直接利用最小二乘法来求解参数:

式中, 作为特征点在空间中的位置估计。这里将上述的最小二乘问题转化成二阶锥(SOCP)来求解,求解出激光雷达与车体之间的关系,并进一步推导出激光雷达与激光雷达之间的外参。
作为特征点在空间中的位置估计。这里将上述的最小二乘问题转化成二阶锥(SOCP)来求解,求解出激光雷达与车体之间的关系,并进一步推导出激光雷达与激光雷达之间的外参。
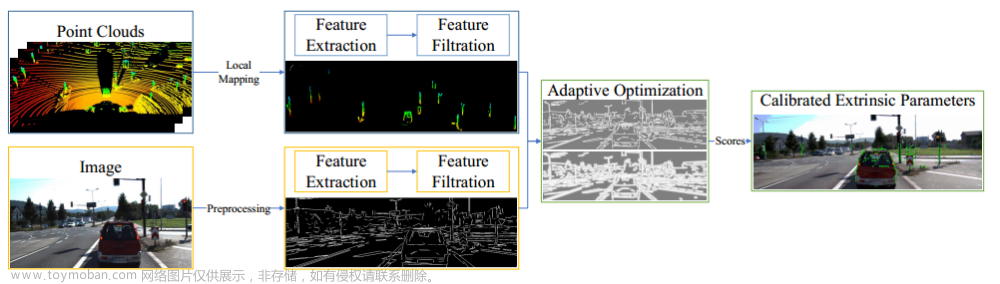
激光雷达与摄像头的标定
自动驾驶的车上,激光雷达与无人驾驶汽车为刚性连接,两者之间的相对姿态和位移固定不变。因此,激光雷达扫描获取到的数据点,在环境坐标系中有唯一的位置坐标与之对应。同样的,摄像头在环境坐标系中也有唯一的位置坐标。这样看来,激光雷达与摄像头之间必然存在着一个关系来完成坐标转换。激光雷达与摄像头的联合标定,就是上文提到的通过提取标定物在单线激光雷达和图像上的对应特征点,完成单线激光雷达坐标、摄像头坐标、图像像素坐标等多个传感器坐标的统一,实现激光雷达与摄像头的空间校准。
当完成摄像头外参标定、激光雷达的外参标定之后,二者之间的关系可以完全确定。当摄像头与激光雷达同时观察点P时,点P在摄像头自身环境坐标中的坐标为PVC(xVC, yVC, zVC),在摄像头图像的图像像素坐标系下的投影坐标为U(u, v, 1)T,在激光雷达坐标系下的坐标为Pl(xl, yl, zl)。假设激光雷达与摄像头的坐标转换关系为(R | T),则激光点云中的扫描点(xl, yl, zl)在图像像素坐标系中的坐标(u, v)可以通过下式算出:
其中,K为摄像头的内参矩阵。
对上式进行变换可得:文章来源:https://www.toymoban.com/news/detail-483133.html

激光雷达与摄像头的标定,转化为对上式中的(R | T)求解。(R | T)共有12个参数来进行求解,因此理论上至少需要4组数据才能计算得到最终结果。为了提高精度,一般在标定过程中使对应点的数量n>4,之后使用最小二乘法进行求解。文章来源地址https://www.toymoban.com/news/detail-483133.html
到了这里,关于自动驾驶专题介绍 ———— 激光雷达标定的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!