本章节给大家介绍不用标定板,标定精度还很高的方法。
原始照片如下:
发现照片是畸变很大的照片。
此时可能会采用机器人九点标定,但实际情况是由于机械空间限制,机器人标定的时候,其范围只有如下图所示:
只能在这个小的空间里进行标定,红色框范围内的电池抓取还好,虽然有点歪,但是勉强能抓起来(到底能有多歪,可以通过RMS(上一章节有介绍)来对红框内的定位进行评价),但是越靠近右边的电池,精度越差。
那么如何可以解决该类问题???
大家刚学halcon的时候,可以说经常会看到网上有人问怎么用halcon做图像畸变矫正啊,然后自己也看例子,学者自己去打印一个标定板,然后自己玩玩标定,结果发现一头雾水,完全不知道这玩意儿到底怎么用
对于这种需要多姿势,多张图片的标定方式,可以在此直接告诉大家,它在工业的场景下并不适用,因为你要考虑到 机械的安装空间,什么光源,什么人在操作(不可能售后,客户去操作?),已经出机很多了后,每个现场不可能配一个标定板. .况且,不同的人操作,最后的标定结果也是千差万别~
那么有什么方法,操作简单,不用标定板,精度还很高?文章来源:https://www.toymoban.com/news/detail-483715.html
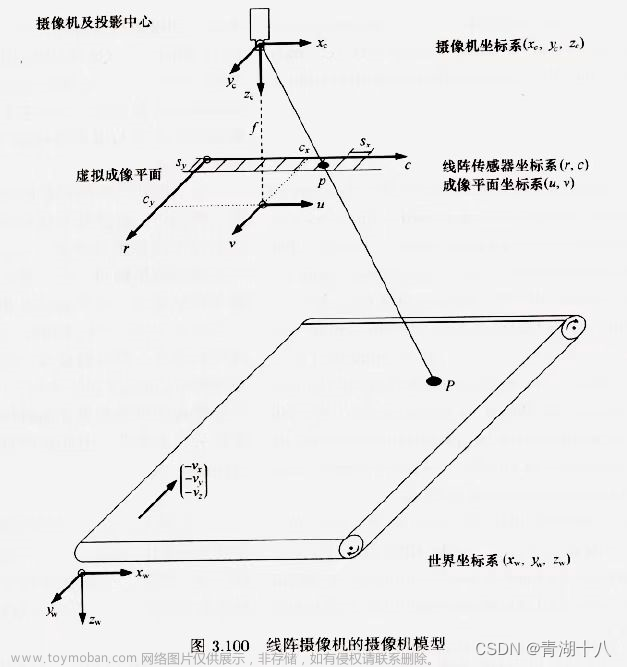
这种看似是异想天开,做梦一样的想法,其实是有答案的,那就是halcon的自标定
它可以在不用标定板的情况下,标定出相机内参,说的文章来源地址https://www.toymoban.com/news/detail-483715.html
到了这里,关于定位教程1----Halcon自标定方法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![[Halcon&3D] 3D手眼标定理论与示例解析](https://imgs.yssmx.com/Uploads/2024/02/574284-1.png)