系列文章目录
第一章 PWM调节
第二章 ADC采样
第三章 光敏传感器
第四章 智能灯光亮度调节器(终)
目录
前言
一、PWM是什么?
二、如何产生一个PWM信号?
总结
前言
本文实现的是一个智能灯光亮度调节器的设计,使用STM32F103ZE的单片机,可以手动调节灯光档位,也可以自动根据环境亮度进行切换灯光档位。这需要用到PWM调光、ADC采集、光敏传感器,本文将会将设计路线呈现出来。
提示:以下是本篇文章正文内容,下面案例可供参考
一、PWM是什么?
我们要调节板子上的LED灯光档位,需要用到PWM(Pulse Width Modulation),全称是脉冲宽度调制,使用PWM时,我们需要关注一下两个参数:
(1)PWM占空比
PWM信号的占空比指该PWM信号的一个周期中高电平所占时间的百分比,若信号始终是高电平,则该信号的占空比为100%,反之若信号始终是低电平,则该信号的占空比为0%,如下图所示,T是整个PWM周期,T1代表占空比:

(2)PWM频率
PWM信号频率有多快,决定了PWM信号走完一个周期的速度。
二、如何产生一个PWM信号?
我们了解完PWM大概是个什么东西后,就要学习如何产生它和使用它。通过STM32的单片机,我们有两个方式去产生PWM信号,第一种是使用普通IO输出PWM,第二种是使用定时器的PWM的IO口:
(1)普通IO口
我们可以翻看手册去看普通IO口的主要功能:(下图转载自其他博主),如果这个IO口的主要功能那一栏出现CHx的标志,则是可以输出PWM的端口,上面的红框中的普就是普通定时器。

(2)PWM端口
STM32的定时器除了TIM6、TIM7,其他的定时器都可以用来产生PWM,高级定时器TIM1与TIM8可同时产生7路的PWM,通用定时器则可以同时产生4路的PWM输出。

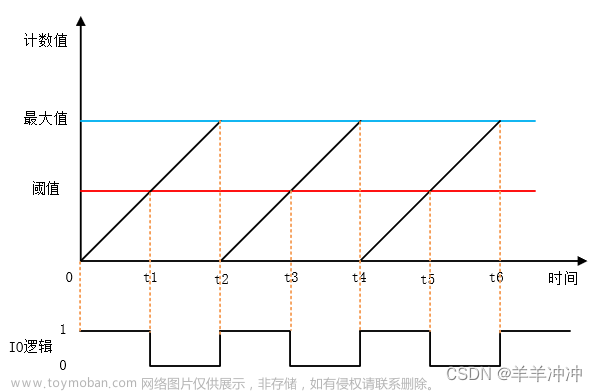
(3)普通IO产生PWM方法
我们使用的是定时器中断去实现的,PWM的产生,我们需要去确定两个参数:周期、占空比,而如何确定周期呢,我们知道T=1/f,所以只要把频率确定下来,周期就知道啦。而我们确定了时间后,占空比就是这个这段时间中高电平所占的时间的百分比就是我们想要的占空比啦。
例如,我们现在要去产生一个1KHz的占空比为50%的PWM,我们知道了频率为1KHz,那么周期根据T=1/f,就可以知道T=1ms,那么一个周期就是1ms。那占空比为50%,说明在一个1ms的周期中高电平所占的时间为0.5ms。那我们使用定时器中断,每0.1ms产生一次中断,每次进入中断时计数,中断服务函数前五次中断给高电平就可以实现占空比50%。
(4)PWM口产生PWM
我们使用PWM口时需要先了解一下相关的定时器:ARR、PSC、CNT、CR1
自动重装载寄存器ARR:

该寄存器用于配置自动重装载值ARR
预分频寄存器PSC:

该寄存器用于配置预分频系数
计数器CNT:

该寄存器用于配置计数值
控制寄存器CR1:



根据控制寄存器位4的设定,分为两种计数模式:


了解完上面的寄存器后,我们开始学习产生PWM的过程:举例一种情况,定时器的重装载值为ARR,比较值为CCR,每次计数时,都会将CNT计数值与CCR进行比较,若计数值CNT小于CCR,则输出低电平,若计数值CNT大于CCR,则输出高电平,那么这时占空比就是可以通过调整CCR的值去改变,而PWM的频率就可以通过调整ARR与PSC去调整。我们的配置过程为:
①初始化TIMx,设置TIMx的ARR和PSC。
②设置TIMx_CHx的PWM模式,使能TIMx的CHx输出。
③使能TIMx。
④修改TIMx_CCRx来控制占空比。
timer.c:
//TIM3 PWM 部分初始化
//PWM 输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //①使能定时器 3 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|
RCC_APB2Periph_AFIO, ENABLE); //①使能 GPIO 和 AFIO 复用功能时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //②重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出 TIM3 CH2 的 PWM 脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //①初始化 GPIO
//初始化 TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在自动重装载周期值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM 向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //③初始化 TIMx
//初始化 TIM3 Channel2 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择 PWM 模式 2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //④初始化外设 TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能预装载寄存器
TIM_Cmd(TIM3, ENABLE); //⑤使能 TIM3
}mian.c:
int main(void)
{
TIM3_PWM_Init(899,0);
while(1)
{
...
}
}总结
以上是PWM的学习与产生过程,后面的文章会说明如何使用PWM调节灯光档位,下面给一个正点原子的例程,是一个呼吸灯,可以烧录进自己的板子上看看,让自己更好的理解PWM的用处。文章来源:https://www.toymoban.com/news/detail-483957.html
链接:https://pan.baidu.com/s/1UkNmRrqFlHx0dCuAHHDfRA?pwd=hxdg
提取码:hxdg文章来源地址https://www.toymoban.com/news/detail-483957.html
到了这里,关于基于STM32的智能灯光亮度调节器【正点原子】(一)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!