首先呢,今天要聊聊工业视觉领域应用中抓取物料要用到“旋转中心”,我们先思考一下以下两个问题:
1、为什么要标定旋转中心?
2、旋转中心的标定步鄹分为哪些?
一、为什么要标定旋转中心?
在我们现在工业视觉应用的过程中,存在这样的案例:机械手要抓取物料,物料每次的角度不一样,机械手末端的工具中心和旋转轴的中心不重合,从而导致机械定位误差比较大。
如果要更好的完成该抓取动作的过程,有以下两个解决办法:
1.TCP标定
目前市场上普遍的机械手都有建立新工具坐标系的功能。比如:EPSON.、博郎特等。TCP标定的本质:求旧工具坐标系和新工具坐标系之间的旋转平移矩阵。
另外市场上还存在一种情况,如果你使用的运动结构是运动控制卡控制,并且设备中一般带有旋转轴结构,这个时候我们就需要标定旋转中心和旋转半径了。
二、旋转中心的标定步鄹
1、先要完成九点标定(相机位置默认固定位置)。
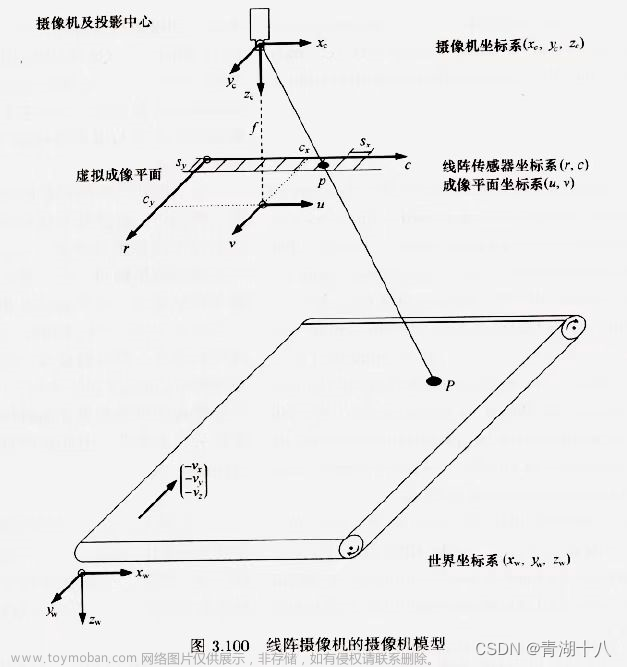
2、如下图,取一个物料在旋转工具上放置一个Mark点,旋转角度,获取3个点,利用3点拟合圆,求的圆心坐标和旋转半径
2.1 打开Halcon,Mark点提取,图像预处理后得到3个点后,转世界坐标系,三点拟合圆,在Halcon实现代码的过程,如下图
2.2 使用旋转中心计算偏移量的过程,这一步是最关键的一步,三点拟合圆后可先计算出A点到旋转轴O1点的偏差Q。
物料A点到B点摆正过程的,实际是2D平面下点的仿射变换,先求出A点下的世界坐标,再求出旋转夹角,由点A的坐标和夹角,再求出B点的世界坐标和偏移量。Halcon的实现代码如下图文章来源:https://www.toymoban.com/news/detail-484514.html
 文章来源地址https://www.toymoban.com/news/detail-484514.html
文章来源地址https://www.toymoban.com/news/detail-484514.html
到了这里,关于机器视觉旋转中心的标定的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!