前言
一、工业相机概述
相机的主要功能是采集图像。早期的相机一般为模拟相机,需要配合图像采集卡使用,通过采集卡将模拟电信号转换成数字电信号,再传送至电脑。随着数字接口技术的发展与普及,数字相机取代了原来模拟相机。数字相机可以遵从一定的通信协议,可以直接将采集到的图像转换为数字电信号。数字相机成为了机器视觉系统中的主流相机。
二、CCD相机组成与工作原理
1.CCD传感器
电荷耦合器件图像传感器CCD(Charge Coupled Device),它使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想像来修改图像。
2.CCD相机工作原理
CCD传感器是一种新型光电转换器件,它能存储由光产生的信号电荷。当对它施加特定时序的脉冲时,其存储的信号电荷便可在CCD内作定向传输而实现自扫描。它主要由光敏单元、输入结构和输出结构等组成。它具有光电转换、信息存贮和延时等功能,而且集成度高、功耗小,已经在摄像、信号处理和存贮3大领域中得到广泛的应用,尤其是在图像传感器应用方面取得令人瞩目的发展。CCD有面阵和线阵之分,面阵是把CCD像素排成1个平面的器件;而线阵是把CCD像素排成1直线的器件。由于在军事领域主要用的是面阵CCD,因此这里主要介绍面阵CCD。
三、CMOS相机组成与工作原理
1.CMOS传感器
CMOS(Complementary Metal-Oxide-Semiconductor),中文学名为互补金属氧化物半导体,它本是计算机系统内一种重要的芯片,保存了系统引导最基本的资料。CMOS的制造技术和一般计算机芯片没什么差别,主要是利用硅和锗这两种元素所做成的半导体,使其在CMOS上共存着带N(带-电)和 P(带+电)级的半导体,这两个互补效应所产生的电流即可被处理芯片记录和解读成影像。后来发现CMOS经过加工也可以作为数码摄影中的图像传感器,CMOS传感器也可细分为被动式像素传感器(Passive Pixel Sensor CMOS)与主动式像素传感器(Active Pixel Sensor CMOS)。
2.CMOS相机的工作原理


3.CDD与CMOS传感器对比
1、 成像过程
CCD 与CMOS 图像传感器光电转换的原理相同,他们最主要的差别在于信号的读出过程不同;由于CCD仅有一个(或少数几个)输出节点统一读出,其信号输出的一致性非常好;而CMOS 芯片中,每个像素都有各自的信号放大器,各自进行电荷-电压的转换,其信号输出的一致性较差。但是CCD 为了读出整幅图像信号,要求输出放大器的信号带宽较宽,而在CMOS 芯片中,每个像元中的放大器的带宽要求较低,大大降低了芯片的功耗,这就是CMOS芯片功耗比CCD 要低的主要原因。尽管降低了功耗,但是数以百万的放大器的不一致性却带来了更高的固定噪声,这又是CMOS 相对CCD 的固有劣势。
2、 集成性
从制造工艺的角度看,CCD 中电路和器件是集成在半导体单晶材料商,工艺较复杂,世界上只有少数几家厂商能够生产CCD 晶元,如DALSA、SONY、松下等。CCD 仅能输出模拟电信号,需要后续的地址译码器、模拟转换器、图像信号处理器处理,并且还需要提供三组不同电压的电源同步时钟控制电路,集成度非常低。而CMOS是集成在被称作金属氧化物的版单体材料上,这种工艺与生产数以万计的计算机芯片和存储设备等半导体集成电路的工艺相同,因此声场CMOS 的成本相对CCD 低很多。同时CMOS 芯片能将图像信号放大器、信号读取电路、A/D 转换电路、图像信号处理器及控制器等集成到一块芯片上,只需一块芯片就可以实现相机的所有基本功能,集成度很高,芯片级相机概念就是从这产生的。随着CMOS 成像技术的不断发展,有越来越多的公司可以提供高品质的CMOS 成像芯片,包括:Micron、 CMOSIS、Cypress等。
3、 速度
CCD 采用逐个光敏输出,只能按照规定的程序输出,速度较慢。CMOS 有多个电荷-电压转换器和行列开关控制,读出速度快很多,目前大部分500fps 以上的高速相机都是CMOS 相机。此外CMOS 的地址选通开关可以随机采样,实现子窗口输出,在仅输出子窗口图像时可以获得更高的速度。
4、噪声
CCD 技术发展较早,比较成熟,采用PN 结或二氧化硅(SiO2)隔离层隔离噪声,成像质量相对CMOS 光电传感器有一定优势。由于CMOS 图像传感器集成度高,各元件、电路之间距离很近,干扰比较严重,噪声对图像质量影响很大。近年,随着CMOS 电路消噪技术的不断发展,为生产高密度优质的CMOS 图像传感器提供了良好的条件。
随着CMOS图像传感器的技术日趋进步,同时具有成像速度快,功耗少,成本低的优势,所以现在市面上的工业相机大部分使用的都是CMOS的图像传感器。

四、相机的分类
1.按芯片工艺类型
CMOS
*CMOS 集成在金属氧化物的半导体材料上
*CMOS制造成本和功耗低
*色彩还原能力偏弱
*CMOS芯片有卷帘式曝光与全局曝光,前者拍静物,后者动静
CCD
*CCD集成在半导体单晶材料上
*CCD制造成本与功耗高
*色彩还原性强 图像锐利度好清晰度好
*帧曝光与全局曝光,动静
2.按传感器类型(像素排列方式)
线阵相机
*芯片为线阵
*相机与物体要相对运动才能成像
*价格高
*能有非常大高的行频与横向分辨率
*由于传输数据量大,接口一般 GigE CameraLink CoaXPress
面阵相机
*芯片为面阵,相机接口常见有C,CS,F
*物体运动静止都能成像
*根据性能价格不一
*可以实时直观获得二维图像信息从而更加直观的对图像进行测量,常用接口 GigE,IEEE1394 ,USB,Camera Link多种接口
3.按图像模式
彩色相机(图像为彩色) 黑白相机(图像为灰度图像)
4.按信号输出方法
模拟相机,数字相机
5.按其他方式分类
按分辨率(普通分辨率相机,高分辨率相机)
按输出信号速度(普通速度相机,高速相机)
按相应光谱 (可见光相机,红外线相机,紫外线相机)
五、面阵相机的主要参数及应用说明
1.传感器尺寸
即靶面尺寸,面阵相机以芯片的对角线长度来度量;线阵相机以芯片的横向长度来测量。在工业上面阵相机常用传感器尺寸如下表:
2.像素
像素是图像最小组成单元。将任意图片局部放大,每一小格表示一个像素,其中每一个像素对应一个灰度值。
3.像元
像元是相机芯片上最小感光单位,每一个像元对应图像上的一个像素。
4.像元尺寸
像元尺寸是相机芯片上每个像元的实际物理尺寸,常见的有2.2um,3.45um,3.75um,4.8um,5.5um,5.86um,7.4um等等。相同尺寸的芯片,外部光照环境和相机参数设置相同(比如曝光时间与增益)的情况下,像元尺寸越大,接受光子越多,芯片灵敏度越高,感光性越好,图越亮。
5.像元深度
像素深度是指存储每个像素所用的位数,也用它来度量图像的分辨率。像素深度决定彩色图像的每个像素可能有的颜色数,或者确定灰度图像的每个像素可能有的灰度级数。
例如,一幅彩色图像的每个像素用R,G,B三个分量表示,若每个分量用8位,那么一个像素共用24位表示,就说像素的深度为24,每个像素可以是16 777 216(2的24次方)种颜色中的一种。在这个意义上,往往把像素深度说成是图像深度。表示一个像素的位数越多,它能表达的颜色数目就越多,而它的深度就越深。
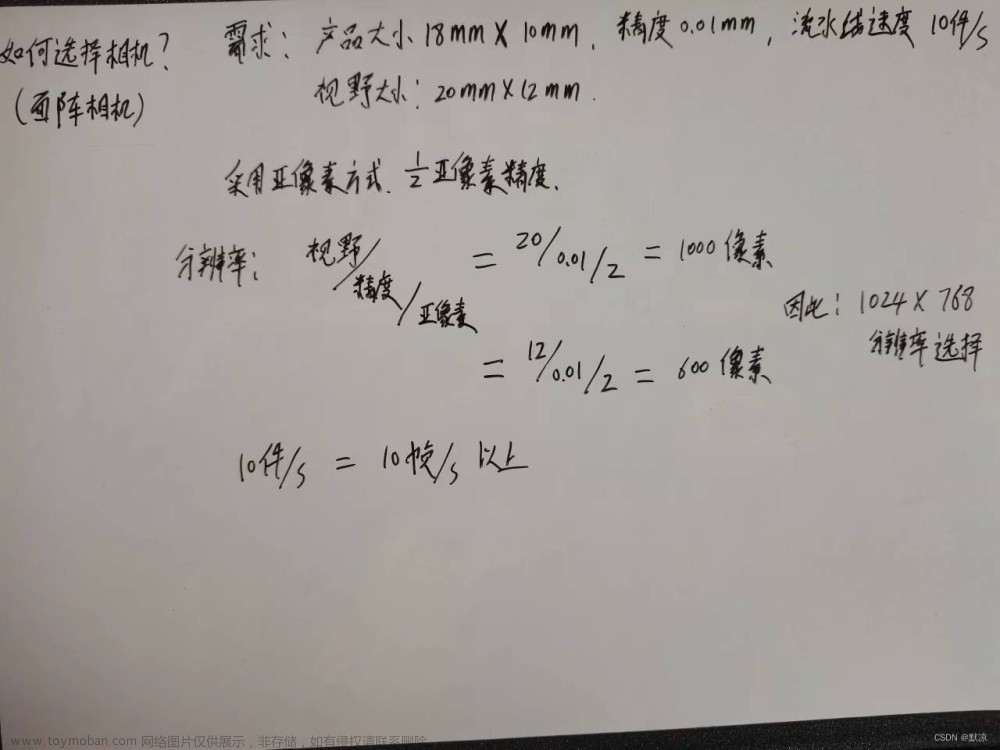
6.分辨率
分辨率,又称解析度、解像度,可以细分为显示分辨率、图像分辨率、打印分辨率和扫描分辨率等。显示分辨率(屏幕分辨率)是屏幕图像的精密度,是指显示器所能显示的像素有多少。由于屏幕上的点、线和面都是由像素组成的,显示器可显示的像素越多,画面就越精细,同样的屏幕区域内能显示的信息也越多,所以分辨率是个非常重要的性能指标。可以把整个图像想象成是一个大型的棋盘,而分辨率的表示方式就是所有经线和纬线交叉点的数目。显示分辨率一定的情况下,显示屏越小图像越清晰,反之,显示屏大小固定时,显示分辨率越高图像越清晰。例如一个相机的分辨率为1280x1024,表示每行有1280个像元,共1024行像元,此相机分辨率约为130w像素。
7.精度
图像中每个像素代表实际物理尺寸。
精度=单方向视场大小/相机单方向分辨率
eg:视场水平方向的长度为32mm,相机水平分辨率1600,求得视觉系统精度每像素0.02mm。在实际应用中,理论精度要高于要求精度才能保证系统稳定性。
8.帧率/行频
相机采集频率,面阵相机用帧率表示,线阵相机用行频表示。
面阵相机帧率单位为FPS(帧每秒)指每秒能采集多少张图;线阵相机行频单位为HZ,指每秒多少行图像。
分辨率越高,帧率、行频越小。
9.增益
输入信号与输出信号放大比例,用来提高整体画面亮度,单位DB。
10.外触发
外触发是一种被动的输出模式,实时性高,比如抓拍运动的物体。触发信号可以由软件产生,也可以由传感器/机械开关产生,叫软/硬触发。
工业相机的外触发
工业相机外触发就是通过软件、传感器或机械开关给工业相机一个信号,相机接到这个信号后实施拍照动作。抓拍的张数可以通过软件设定,利用软件延时可以抓拍两张,三张,甚至更多。例如,在道路监控系统中,工业相机的外触发是通过雷达或线圈测速产生的,当雷达或者线圈检测到车辆时,就会给工业相机一个信号,同时给出车辆实时速度,工业相机接收到信号后,就会进行抓拍动作,软件得到实时速度数据后,与预先设定的速度数据相比,若大于设定速度数据,则认为超速,并在拍完第一张图片后,延时抓拍第二张照片,从而对超速车辆实施罚款措施。
工业相机的触发方式
1、软件触发模式:对动态检测可选择,产品连续运动能给触发信号的可选择;
2、硬件触发模式:对高速动态检测可选择,产品连续高速运动能给触发信号的可选择;
3、连续采集模式:对静态检测可选择,产品连续运动不能给触发信号的可选择。
11.曝光时间/曝光方式
曝光时间是为了将光投射到照相感光材料的感光面上,快门所要打开的时间。视照相感光材料的感光度和对感光面上的照度而定。曝光时间长的话进的光就多,适合光线条件比较差的情况。曝光时间短则适合光线比较好的情况
外触发同步采集方式,曝光时间可以与行周期一致,也可以设置一个固定时间。工业相机中暴光反射为行曝光与帧曝光。
12.拖影
拍摄过程中,由于曝光时间与运动速度不匹配,导致物体在像元上重复成像。在这里插入图片描述

13.动态范围
动态范围(或曝光范围)是相机捕捉的光强的范围,通常表示为f-Stops,EV(曝光值),或区段(曝光范围)。它与噪点密切相关:高噪点意味着低动态范围。它也与阶调响应密切相关(阶调响应是指光强与像素级之间的关系(如下所示)。
动态范围=光敏元的满阱容量/等效噪声信号
14.噪点/信噪比
噪点(noise)主要是指CCD(CMOS)将光线作为接收信号并输出的过程中所产生的图像中的粗糙部分,也指图像中不该出现的外来像素,通常由电子干扰产生。这些噪音信号就会污染画面的纯净度。
信噪比 为相机系统中真实图像信号与图像信噪的比例。
15.光谱响应
光谱响应指相机芯片对不同波长的光线的响应能力,一般由光谱响应曲线表示。(根据相机芯片响应光谱不同,可把相机分为 普通相机,红外相机,紫外相机)
六、相机标准
1.GenlCam
GenlCam(相机通用协议)可为各种类型的相机提供通用的编程接口,从而实现不同品牌相机的互换性,其目的是在全行业实现相同应用编程接口(API)。
GenlCam标准由多种模块构成
1.GenTL
GenTL:(通用传输层)将传输层编程接口标准化。实现相机列举,相机寄存器访问,流数据和异步事件传输。
2.GenApi
GenApi:(通用应用编程接口)用于设置相机应用程序开发接口。
3.SFNC
SFNC:(标准特点命名规范)将相机自描述文件中的相机特点的名称,类型,意义和使用标准化。确保不同供应商提供的相机在相同功能下使用同一名称。
4.GenCP
GenCP:(通用控制协议)将控制协议的包布局标准化,且由接口标准使用,以重新使用部分控制路径应用。
2.硬件传输接口
1.GigE接口
GigE:最新引进的标准界面,GigE仍在定义设计中, 以1000Mb以太网路为基准,它供给大约108Mb连续带宽(和500Mb以上的Camera Link相比),对于长度100公尺以上的标准,GigE最大的好处是讯号线加上电路规格或转换器长度可达1000公尺以上。
2.USB接口
通用串行总线(英语:Universal Serial Bus,缩写:USB)是一种串口总线标准,也是一种输入输出接口的技术规范,被广泛地应用于个人电脑和移动设备等信息通讯产品,并扩展至摄影器材、数字电视(机顶盒)、游戏机等其它相关领域。最新一代是USB4,传输速度为40Gbit/s,三段式电压5V/12V/20V,最大供电100W ,新型Type C接口允许正反盲插。 [1]
3.IEEE1394接口
IEEE1394接口是苹果公司开发的串行标准,又称火线接口(firewire)。IEEE1394支持外设热插拔,可为外设提供电源,省去了外设自带的电源,能连接多个不同设备,支持同步数据传输。
4.CameraLink接口
Camera link是从Channel link技术上发展而来的,在Channel link技术基础上增加了一些传输控制信号,并定义了一些相关传输标准。任何具有“Camera link”标志的产品可以方便地连接。Camera link标准由美国自动化工业学会AIA定制、修改、发布,Camera link接口解决了高速传输的问题。 文章来源:https://www.toymoban.com/news/detail-484635.html
文章来源:https://www.toymoban.com/news/detail-484635.html
5.CoaXPress接口
CoaXPress 是一种非对称的高速点对点串行通信数字接口标准。该标准容许设备(如:数字相机)通过单根同轴电缆连接到主机(如:个人电脑中的数据采集设备) 文章来源地址https://www.toymoban.com/news/detail-484635.html
文章来源地址https://www.toymoban.com/news/detail-484635.html
到了这里,关于工业相机选型的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!