简单红外寻迹小车仿真
1、寻迹小车介绍
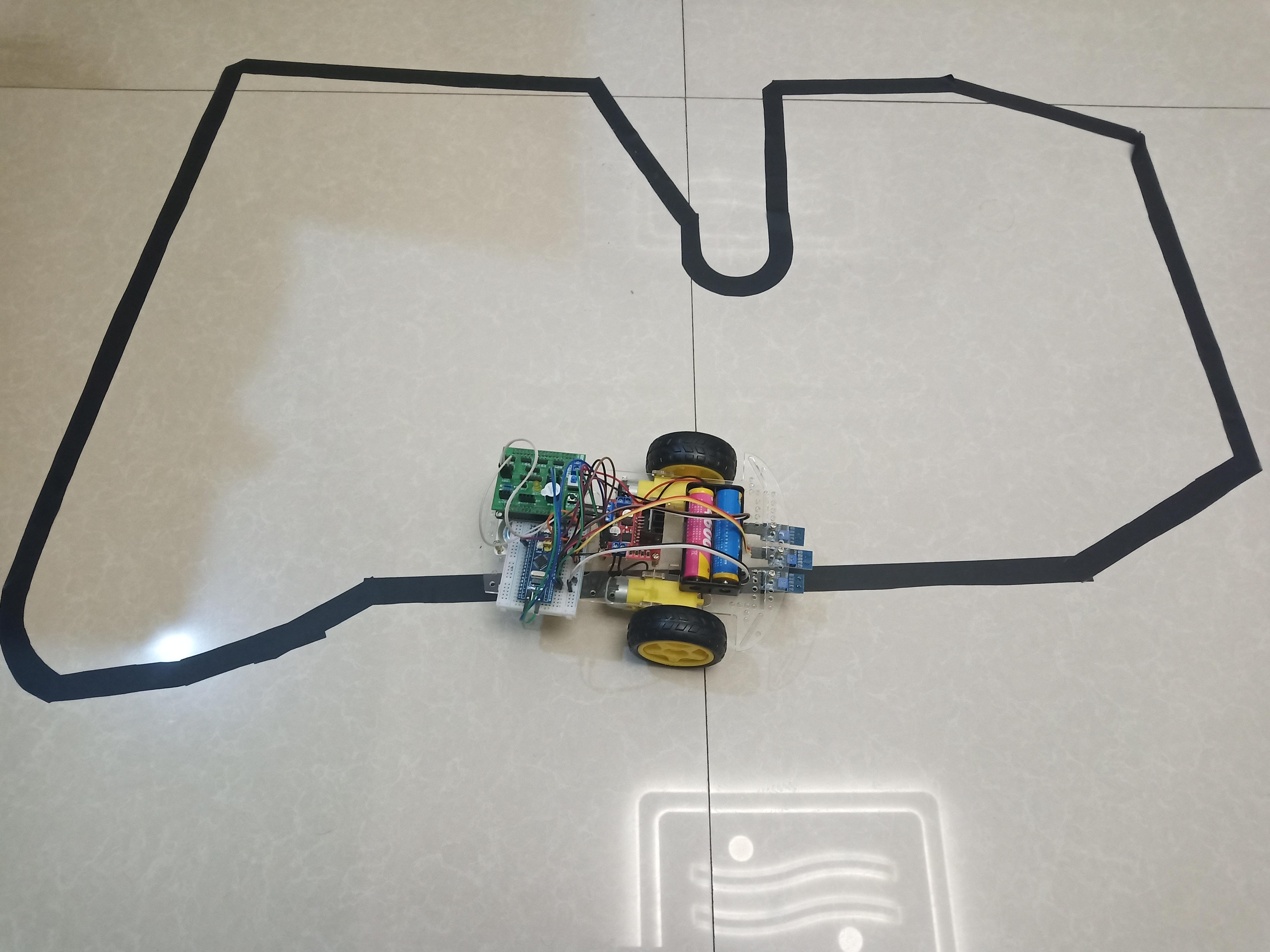
红外寻迹小车是一种简单的Line Flower Robot(LFR)自主导向机器人,它会随地面上的线来检测白色表面上的暗线或黑色表面上的白线。LRF跟随线,因此,机器人必须检测到线的存在,这样问题就变成了如何在 LFR 中实现线路感应机制。
我们知道,光在白色表面的反射最大,在黑色表面上的反射最小,因为黑色表面吸收的光量最大。 因此,我们将利用光的这种特性来检测线条。 要检测光,可以使用 LDR(光敏电阻)或 IR 传感器。 在本实例中,将使用 IR 传感器,因为它具有更高的精度。 为了检测线,我们在机器人的左侧和右侧放置了两个红外传感器,如下图所示。 然后我们将机器人放在线上,使线位于两个传感器的中间。
红外传感器由两个元件组成,发射器和接收器。 发射器基本上是一个 IR LED,它产生信号,而 IR 接收器是一个光电二极管,它感应发射器产生的信号。 红外传感器在物体上发射红外光,照射到黑色部分的光被吸收,因此输出较低,但照射到白色部分的光反射回发射器,然后由红外接收器检测到,从而产生模拟输出 . 使用所述原理,我们通过驱动连接到电机的轮子来控制机器人的运动,电机由微控制器控制。
在前面的文章中,对红外寻迹传感器做了详细的介绍,请参考:文章来源:https://www.toymoban.com/news/detail-484940.html
-
Ardunio开发实例-红外寻迹传感器文章来源地址https://www.toymoban.com/news/detail-484940.html
到了这里,关于Arduino与Proteus仿真实例-简单红外寻迹小车控制仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!






![基于51单片机的红外密码锁设计[proteus仿真]](https://imgs.yssmx.com/Uploads/2024/02/831724-1.png)



