1.2 机器人控制系统软硬件平台
工业机器人软硬件平台架构的概述
工业机器人的发展历程:
- 1950s-1960s:工业机器人诞生,开始应用于生产线自动化。
- 1970s-1980s:工业机器人技术快速发展,引入新的控制方法和结构设计。
- 1990s-2000s:工业机器人技术不断完善,引入数字化控制和网络通信。
- 21世纪:工业机器人技术快速发展,智能化和人机协同成为重要研究方向。
当前工业机器人的状态:
- 技术不断提高:智能化水平提高,控制精度和运行效率有了显著提高。
- 应用范围不断扩大:工业机器人不仅应用于生产线,还应用于医疗、军事、教育等多个领域。
- 市场需求不断增长:随着全球制造业的发展,工业机器人市场需求也在不断增长。
- 国际竞争加剧:全球工业机器人市场竞争加剧,主要生产国不断加强研发能力。
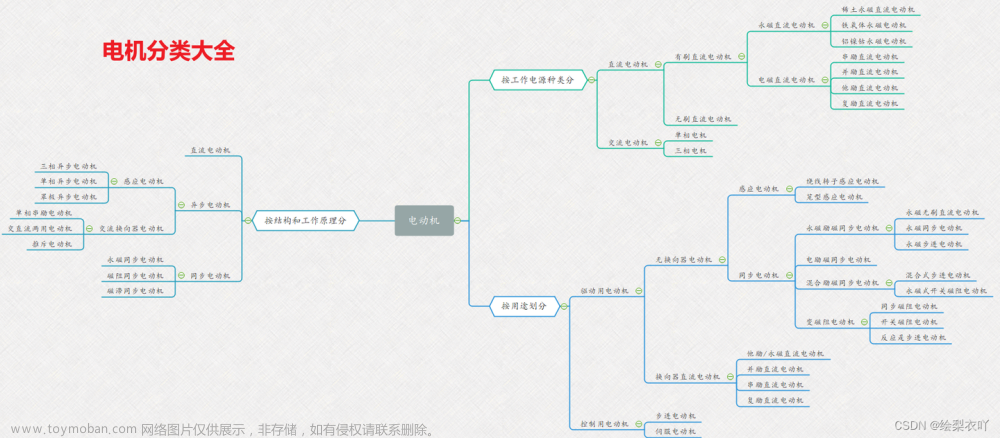
工业机器人的硬件平台架构
工业机器人的硬件平台架构的构成
-
机器人控制器:负责控制机器人运动和任务执行的核心部件,一般采用 PLC 或 PC 平台。
-
运动控制系统:负责控制机器人的运动,可以是电机驱动系统、伺服系统等。
-
传感器:负责检测机器人环境和自身状态的组件,如光电传感器、加速度计等。文章来源:https://www.toymoban.com/news/detail-485624.html
-
输入/输出设备:控制机器人运动和执行任务的输入设备文章来源地址https://www.toymoban.com/news/detail-485624.html
到了这里,关于机器人控制系统软硬件平台的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!