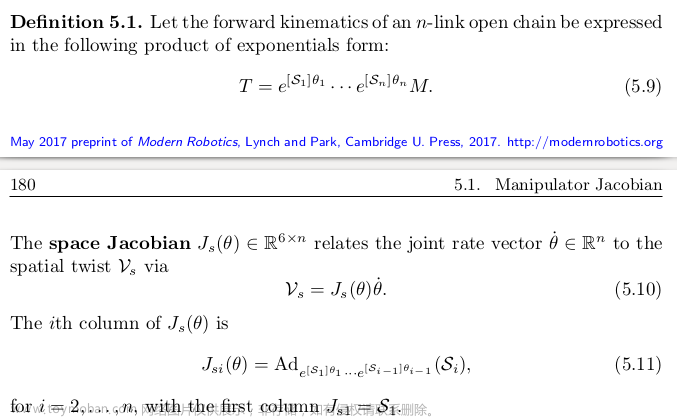
运动学问题是在不考虑引起运动的力和力矩的情况下,描述机械臂的运动。上一篇我们已经讨论了机器人运动方程的表示方法,这一篇将会讨论机器人的DH建模方法。
Denavit-Hartenberg(D-H)模型于1955年首次提出,用于描述机器人连杆和节点之间相互关系。后来逐步完善推导出了D-H 建模法,采用矩阵来表示机器人各杆件相对位姿,再进行坐标变换,得到末端执行器的总变换矩阵。直至今日,仍然是当下主流的机器人建模方法。
参考文章:
标准DH建模与改进DH建模
matlab机器人工具箱六轴机器人的DH模型和改进DH模型建立与区别
标准DH与改进DH的讨论
标准DH建模法
教材中《机器人建模与控制》把标准DH建模法讲得比较清楚,主要是它的坐标系建模方法比较简单、直接。 根据DH表示法确定一个一般步骤为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。如图所示表示了三个顺序关节和两个连杆,每个关节都是可以转动和平移的。第一个关节指定为关节i-1,第二个关节指定为关节i,第三个关节指定为关节i+1。在这些关节前后可能还有其他关节,连杆也是如此表示,连杆i位于关节i与关节i+1之间。
1、standard_DH建立每个关节参考坐标系步骤:

对于(1):每个连杆坐标系z轴的方向确定方法,若旋转关节通过右手定则旋转来确定z轴,若是平动关节则z轴的方向即是沿其关节运动的方向。关节i处的连杆坐标系下标为i-1,以此类推。
对于(2):确定好各连杆坐标系z轴的方向,接下来确定x轴的方向。在关节不平行或相交的情况下,x轴的方向为两关节下坐标系z轴的公垂线的方向。
对于(3):若两关节z轴平行,选取与前一关节公垂线共线的一条垂线来确定x轴方向;若两关节z轴相交,则没有公垂线,就选取两坐标系的z轴叉乘的平方的方向来确定x轴的方向。
当z轴和x轴都确定好之后,y轴的方向通过右手定则来确定。
2、standard_DH建模分析的步骤:

改进DH建模法
1、modified_DH建立每个关节参考坐标系步骤:


可以看出,改进DH相较于标准DH法建立连杆坐标系有很大不同。
2、modified_DH建模分析的步骤:

标准与改进DH建模法的区别

(1)固连坐标系不同
SDH方法关节i上固连的是i-1坐标系,即坐标系建在连杆的输出端;MDH关节i上固连的是i坐标系,即坐标系建在连杆的输入端。
(2)坐标系变换顺序不同
SDH方法是ZX类变换:先绕着i-1坐标系的的Zi-1轴旋转和平移,再绕着坐标系i的Xi轴进行旋转和平移;MDH方法是XZ类变换:先绕着i坐标系的的Xi轴旋转和平移,再绕着坐标系i的Zi轴进行旋转和平移;
(3)SDH是后置模型,将末系和基系,建立在一起;改进DH是前置模型,将0系和1系,建立在一起。因此,SDH下表示的位姿和MDH下的位姿相比差了一个基座标系到末坐标系的变换,一般性都是一个纯平移。当然这个变换可以补偿到DH参数表中。
实例分析
1.实例一
分别使用标准DH与改进DH表示法建立如下机械手的坐标系,写出其DH表。
从上图可以看出,这是一个普通的0-R-R-R的机械臂,基座固定,各关节都是旋转关节,且连杆都在同一平面内。
modified_DH表示

如图,由于所有连杆在同一坐标系内,所以所有坐标系的的Z轴都垂直于纸面向外,基坐标系{0}与坐标系{1}原点重叠。给出DH表:
standard_DH表示

如图,由于所有连杆在同一坐标系内,所以所有坐标系的的Z轴都垂直于纸面向外,坐标系{2}与末端坐标系{3}原点重叠。给出DH表:
1.实例二:

以上图图纸的机器人为例,分别用标准和改进DH法建立坐标系。
standard_DH表示

 文章来源:https://www.toymoban.com/news/detail-485834.html
文章来源:https://www.toymoban.com/news/detail-485834.html
modified_DH表示

 文章来源地址https://www.toymoban.com/news/detail-485834.html
文章来源地址https://www.toymoban.com/news/detail-485834.html
到了这里,关于机器人学基础(三):机器人运动学的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!