(⊙﹏⊙)如下同样是AI撰写。
您可以使用两轮差速移动机器人的控制代码来控制它从A点移动到B点。可以使用各种语言,如C,C++,Python等来编写控制代码。
从A点移动到B点的C代码应该是:moveToB(A,C);
差动运动学模型机器人从A点移动到B点的C语言代码是一种基于位置、速度和加速度的控制算法,可以使机器人从A点移动到B点。C语言代码可以实现机器人的路径规划、速度控制和位置控制等功能。
差动运动学模型机器人从A点移动到B点的C语言代码案例可以参考下面的示例:
#include <stdio.h>
int main(){
int A_x = 0;
int A_y = 0;
int B_x = 10;
int B_y = 10;
int x = A_x;
int y = A_y; while (x < B_x || y < B_y){
if (x < B_x){
x++;
}
if (y < B_y){
y++;
}
printf("Robot at x: %d, y: %d\n", x, y);
} return 0;
}
好像看起来都不能用呢……
如果问出一个好问题,那么会获得惊呆的结果!
#include <ros/ros.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "example_node");
ros::NodeHandle nh; // 定义两个点
double A[2] = {1.0, 2.0};
double B[2] = {3.0, 4.0}; // 发布机器人移动消息
ros::Publisher move_pub = nh.advertise<geometry_msgs::Twist>("cmd_vel", 1000);
geometry_msgs::Twist move_cmd; // 计算两点之间的距离
double distance = sqrt( pow(A[0] - B[0], 2) + pow(A[1] - B[1], 2) ); // 设置机器人的速度
move_cmd.linear.x = 0.2;
move_cmd.angular.z = 0.2; // 不断发布移动指令,直至两点之间的距离小于0.1
while (distance > 0.1)
{
move_pub.publish(move_cmd);
distance = sqrt( pow(A[0] - B[0], 2) + pow(A[1] - B[1], 2) );
}
return 0;
}当然也有如下案例:
下面是C语言代码,用来控制两轮差速移动机器人从A点移动到B点://变量声明
int x_A, y_A; //A点的x和y坐标
int x_B, y_B; //B点的x和y坐标
int v_l, v_r; //左右轮速度
//计算目标点和当前点之间的距离
int dist_AB = sqrt(pow(x_B-x_A,2)+pow(y_B-y_A,2));
//计算机器人当前位置和目标点之间的角度
int angle_AB = atan2(y_B-y_A,x_B-x_A);//根据距离和角度计算左右轮速度
v_l = (2 * dist_AB * cos(angle_AB))/(dist_AB + L);
v_r = (2 * dist_AB * sin(angle_AB))/(dist_AB + L);//通过ROS发送左右轮速度命令
send_velocity(v_l,v_r);
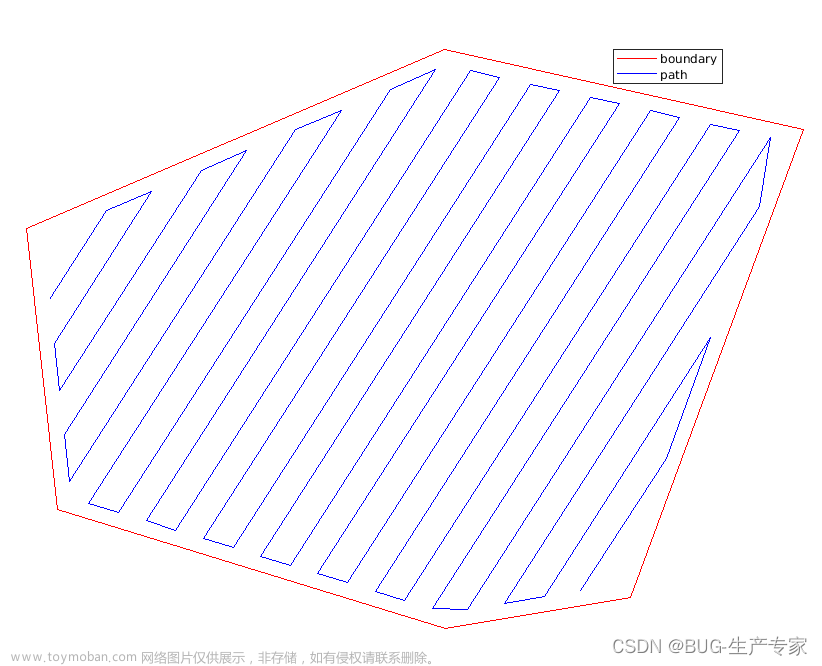
A-B路径:
这是一个经典的路径规划问题,可以使用各种算法来解决,比如 A* 算法、Dijkstra 算法、BFS 算法等。具体的实现方式取决于具体的场景和需求。如果需要考虑障碍物、地形等因素,可以使用启发式搜索算法,如 A* 算法;如果需要考虑最短路径,可以使用 Dijkstra 算法;如果需要快速找到一条路径,可以使用 BFS 算法。在实际应用中,还需要考虑算法的效率、可扩展性、可维护性等因素。
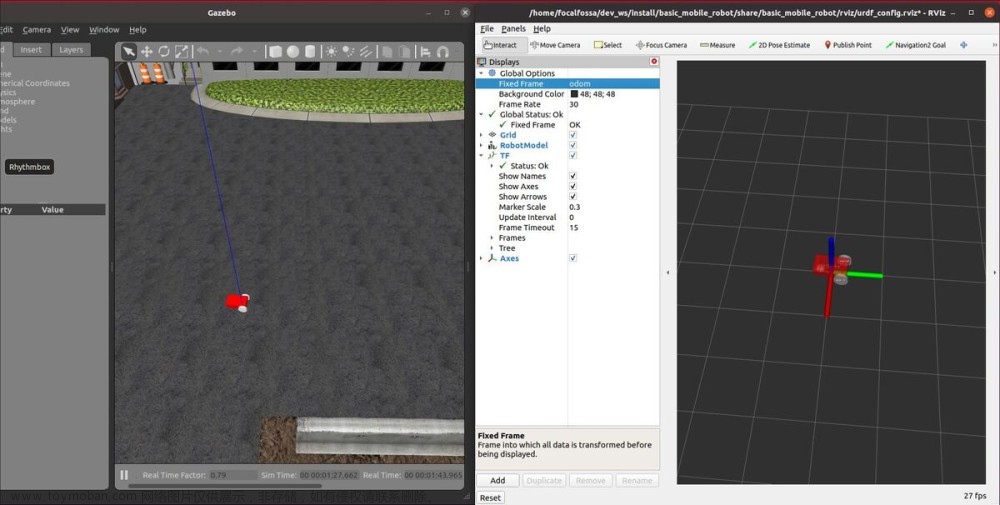
首先,需要使用ROS中的导航栈来实现机器人的导航。具体步骤如下:
创建一个地图:使用SLAM算法或者手动创建地图,将地图保存为一个ROS包。
启动导航栈:启动ROS中的导航栈,包括move_base节点、amcl节点等。
设置起点和目标点:使用RViz工具设置机器人的起点和目标点。
规划路径:导航栈会根据地图和起点、目标点信息规划一条路径。
控制机器人移动:导航栈会将路径转化为机器人的控制指令,控制机器人移动到目标点。
总之,机器人从起点导航到目标点的详细步骤就是:创建地图、启动导航栈、设置起点和目标点、规划路径、控制机器人移动。
以下是ROS机器人设置导航目标点的代码:
rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped '{header: {stamp: now, frame_id: "map"}, pose: {position: {x: 1.0, y: 2.0, z: 0.0}, orientation: {w: 1.0}}}'
这个命令会向move_base_simple/goal话题发布一个geometry_msgs/PoseStamped消息,其中包含了机器人要到达的目标点的位置和方向。
ROS2:文章来源:https://www.toymoban.com/news/detail-485900.html
import rclpy
from geometry_msgs.msg import PoseStamped
def set_goal():
rclpy.init(args=None)
node = rclpy.create_node('set_goal_node')
pub = node.create_publisher(PoseStamped, '/goal', 10)
goal = PoseStamped()
goal.header.frame_id = 'map'
goal.pose.position.x = 1.0
goal.pose.position.y = 2.0
goal.pose.orientation.w = 1.0
pub.publish(goal)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
set_goal()ROS1:文章来源地址https://www.toymoban.com/news/detail-485900.html
import rospy
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
import actionlib
def move_to_goal(x, y):
# 初始化节点
rospy.init_node('move_to_goal', anonymous=False)
# 创建一个客户端,用于发送目标点
client = actionlib.SimpleActionClient('move_base', MoveBaseAction)
# 等待服务器启动
client.wait_for_server()
# 创建一个目标点
goal = MoveBaseGoal()
goal.target_pose.header.frame_id = "map"
goal.target_pose.header.stamp = rospy.Time.now()
# 设置目标点的坐标
goal.target_pose.pose.position.x = x
goal.target_pose.pose.position.y = y
goal.target_pose.pose.orientation.w = 1.0
# 发送目标点
client.send_goal(goal)
# 等待机器人到达目标点
client.wait_for_result()
if __name__ == '__main__':
try:
# 设置目标点的坐标
x = 1.0
y = 2.0
# 移动到目标点
move_to_goal(x, y)
except rospy.ROSInterruptException:
pass到了这里,关于两轮差速移动机器人从A点移动到B点的C++语言代码的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!