背景介绍
Delta 并联机构具有工作空间大、运动耦合弱、力控制容易和工作速度快等优点,能够实现货物抓取、分拣以及搬运等,在食品、医疗和电子等行业中具有广泛的应用。在结构设计的基础上,本部分通过运动学和动力学分析,为并联机构优化设计提供前期基础,具体内容如下:

运动学分析
结构设计是指在满足基本功能的基础上,修改其外形和尺寸以达到实用性和美观性,并尽可能的进行轻质化处理,本部分对并联机构的整体结构进行了简单的介绍,并且对各零件进行初步的选型,主要包括连接方案(鱼眼轴承),电机选型,传动方案等

传动设计:电机安装于静平台上(红色底座),通过减速器与主动杆相连,进而通过四杆机构,把电动机转动传递给并联机构输入端,前期推文中采用解析法对四杆机构的运动学进行分析(四杆机构——解析法,2019-05-04))

 ;
;

电机可采用SIMOTICS S-1FL6,产品参数为:工作电压,三相交流 400 V;功率PN=0.4 kW;转速N=3000 U/min M0=1.9 Nm;MN=1.27 Nm;轴高度 45 mm ;绝对值编码器 20 位(12 位多匝) 带滑键;防护等级 IP65;带密封圈;与变频器兼容,其商品编号(市售编号):1FL6042-1AF61-2LA1;减速器选型以及相关参数:减速器可以采用AD090L2-P2-OP2-19-40-80-100-M6-2016

关节轴承实物图:关节轴承(鱼眼轴承)选取:淘宝上具有多种型号,价格实惠(部分国产轴承小于10元)

2、 并联机构优化设计
并联机构的设计、分析与优化需要从机器的运动学、动力学和控制三个方面来保障。
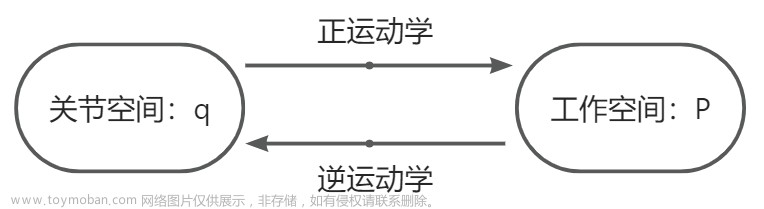
Delta 机器人的运动学建模是获得机构的驱动电机角度与末端执行器位姿的对应关系,是研究动力学和控制器设计的基础和关键。机构的运动学分析通常分为正、逆两方面,是截然相反的两个数学运算过程,已知驱动关节的位置,求解机构末端输出的位姿,称为位置正解;若已知机构末端输出的位姿,求解驱动关节的位置,称为位置逆解(数值法、解析法)。
Delta 机器人的动力学建模同样包含正动力学建模和逆动力学建模两种,前者给定Delta 机器人三个驱动关节的力矩,求对应的关节角度、角速度和角加速度;后者给定三个驱动关节的角度、角速度和角加速度,代入逆动力学方程,求各驱动关节所需要的力矩。
控制系统设计:现在大部分并联机构采用的是基于关节空间的半闭环控制方法,因此,在实际应用中,通常采用标定的方法提高机构的定位精度,减小加工装配误差、测量误差等不利因素对轨迹跟踪精度的影响。调研发现,影响并联机构位姿精度的因素从运动学标定的角度可作如下分类:1)可标定因素,如上、下两平台铰链中心点定位误差、驱动杆轴向驱动误差等;2)不可标定因素,如铰链间隙、驱动杆受力及温致变形导致的误差等。
3、运动学分析
Delta 并联机构动有一个非常独特的优势,即:动平台在任意时刻都与静平台保持平行,运动过程中,不发生倾斜,只有 3 个平动的自由度。

从动臂由平行四边形组成,具有一个很独特的性质:上下两边时刻保持平行,与此同时,各支链与动平台的连接轴不在同一条直线上,因此,动平台与静平台时刻保持平行,运动空间大概的形状如下图所示:
 ;
;
Delta并联机构独特的性质,大大简化了运动学分析的流程,具体如下所示:

取其中某一条支链进行分析,有几何关系可知:
式中:i= 1,2,3。OP = ( x,y,z),x,y,z 为机器人末端在全局坐标系的位置; OAi= T·( e,0,0);e = R-r;A i B i = T · ( L1 cosθi,0,L1 sinθi);T 为旋转矩阵:

并联机器人工作过程中,从动杆BP i 长度不发生变化,即:
 文章来源:https://www.toymoban.com/news/detail-486610.html
文章来源:https://www.toymoban.com/news/detail-486610.html
求解可得主动杆的状态,即: 文章来源地址https://www.toymoban.com/news/detail-486610.html
文章来源地址https://www.toymoban.com/news/detail-486610.html
到了这里,关于工业机器人(六)——运动学分析的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!