🔥一个人走得远了,就会忘记自己为了什么而出发,希望你可以不忘初心,不要随波逐流,一直走下去🎶
🦋 欢迎关注🖱点赞👍收藏🌟留言🐾
✅ 如果觉得博主的文章还不错的话,希望小伙伴们三连支持一下哦
写注释是一个良好的习惯,这个也是看似笨拙,其实可以长久帮助你的习惯。
一、注释是什么
注释: 是对代码的解释和说明,其目的是让人能够更加轻松地了解代码。
二、注释的意义
注释是让人能看懂,代码是让机器能看懂。
三、RobotStudio编辑器怎么注释
RobotStudio 注释的格式是 英文下的叹号 “!”。
比如,一般我们开始写代码一般先说明一下代码的意思。
MODULE Module1
!临时变量
VAR num temp;
!需要排序的一维数组
PERS num nums{6}:=[900,1110,1113,1118,65665,999995];
!总轮数=数组元素的个数-1
!比较的次数=数组元素的个数-轮数(第几轮)
PROC main()
!升序(从小到大)
!外层循环,控制总共需要比较的轮数
FOR i FROM 1 TO 5 DO
!内层循环,控制每轮需要比较的次数
FOR j FROM 1 TO 6-i DO
!比较相邻元素
IF nums{j}>nums{j+1} THEN
!以下三行代码用于交换两个元素
temp:=nums{j};
nums{j}:=nums{j+1};
nums{j+1}:=temp;
ENDIF
ENDFOR
ENDFOR
ENDPROC
ENDMODULE
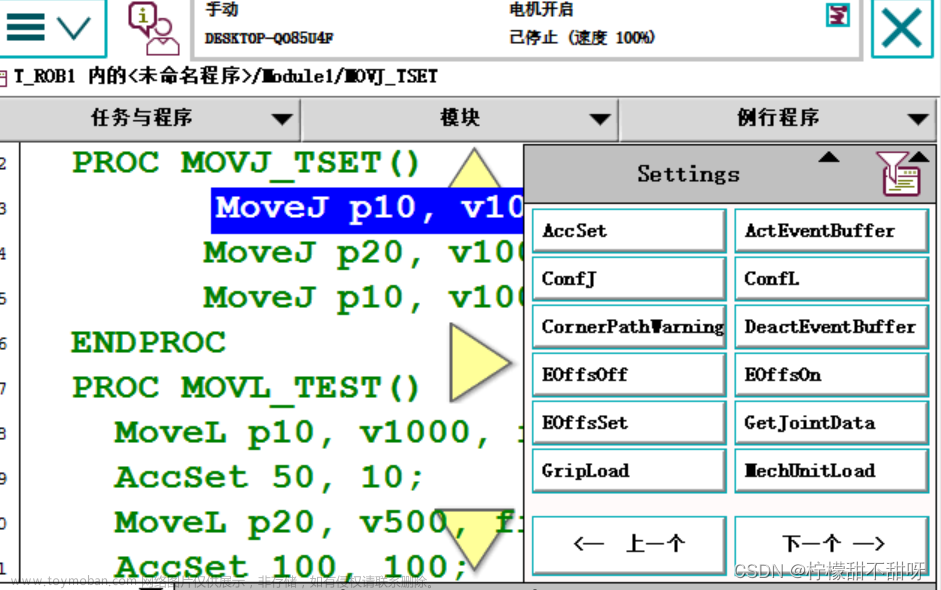
四、示教器怎么注释
编辑 -> 备注行

五、问题
问题:RobotStudio添加中文注释乱码
需要下载RobotStudio最新版添加中文注释才不会乱码。
文章来源:https://www.toymoban.com/news/detail-487322.html
灵感:使用中文注释—轻松读懂ABB机器人RAPID程序代码
这次的分享就到这里啦,继续加油哦^^
希望对你们有所帮助,有出错的地方欢迎在评论区指出来,共同进步,本文已经首发在个人微信公众号:龙猫YOU ,欢迎关注!文章来源地址https://www.toymoban.com/news/detail-487322.html
到了这里,关于ABB机器人注解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!